Introduction of teams
BII, MRVT, Robosoft, Legendary Rover, Mota Seto ...
There are 15 registered teams for Robotour 2017 which will take place in Slovakia (Žilina) on 16th of September 2017. The list is an interesting mixture of old, new and „renovated” teams, for which was the far contest location the last blocking point. We can again look forward to see participants from Czech Republic, Germany, Poland and Switzerland.
Teams
YouTube playlist of all registrations 2017
ARBot (CZ)

|
youtube https://youtu.be/x0iD9MvCjyc
Robot is controlled by SBC UP2. It has 8G RAM, 128 GB SSD, WiFi and BT. The
heart is four-core Intel N4200. UP2 runs on Windows 10 and .NET and C# language
is used as the main programming platform.
The chassis is differentially driven with 3rd passive wheel. The modeller
wheels have diameter 17 cm and two motors PG36555126000-50.9K with encoders are
controlled by professional unit SDC2160 by Roboteq provide necessary
traction. There are two optical odometers ADNS 3080 for further position
improvements. Another sense input is lidar A2 from Smateck.
Time-tested AHRS VN-100 from VectorNav provides information about robot
orientation. The global position information is handled by GPS uBlox NEO 7M.
Robot will navigate with stereo camera R2000 with stabilized gimbals
based on BGC Storm32 this year.
The energy source are 4 LiFePo cells with capacity 14.5 Ah and protected by
SBM. The chassis is built from 2mm thick plywood for air models and 7 mm spruce
beams. Simply model domain. All parts were cut by laser.
BII (CZ)

|
youtube https://youtu.be/_jfjTNawS3g
BII is medium size wheeled robot with 2WS rear wheel drive. The main computer
runs on Xubuntu. The communication with the computer, where we do all the
changes of SW and check run of the program, is realized via router.
Robot software is based on ROS — it reads data from sensors and sends
commands to mbed, which controls the robot motion. "Robot's Eye" is at current
stage laser scanner sick, encoders and IMU. Robot is nevertheless able to use
also GPS and camera, but they are not used for navigation at the moment.
Cogito (CH)

|
Robot Clementine is similar to last year, but different at the same
time:
- The same differentially driven platform, but with stronger motors and controllers compared to last year.
- Again with a stereo camera, but this time with a higher resolution and hopefully more reliable.
- Last year's onboard mini-itx computer was replaced by a more powerful Intel NUC series computer.
- Still the same industrial lidar, diy lidar, GPS, tilt-compensated compass and optical encoders.
Software is built again on top of a time-tested highly modular software
architecture.
Istrobotics (SK)

|
youtube https://youtu.be/5ii9WP3-5eo
The robot is modified RC model TRAXXAS E-MAXX (3903) equipped with webcamera,
GPS, RPLIDAR, sonars HC-SR04, IMU with 3D compass and magnetic IRC. The robot
control and basic sensor processing is done on Arduino mega. Image processing,
lidar and navigation is computed on Raspberry Pi 3. Robot is programmed in C++
and OpenCV.
JECC Fesl (DE)

|
Hardware:
- Intel Xeon-D (8 Cores, 16 Threads) Main CPU, 8GB DDR4 ECC RAM and 64GB
- SSD on Industrial Kontron COM-Express Module.
- Nvidia GTX960 with 4GB VRAM and 2.7TFlops peak compute power.
GPU processes Stereovision (Stereolabs ZED), visual odometry and a
convolutional neural network for image segmentation. CPU runs C++ application
on Ubuntu 16.04 with sensor gathering, custom mapping and pathplanning
algorithms. Heavy usage of AVX2 vector processing and OpenMP to get all out of
the available cores.
To be done: proper openstreetmap integration, better beer keg holder
JECC Lois (DE)
|
HARDWARE:
The robot uses two windshield wiper motors for driving.
All the electronics are powered by two 7,4V/ 5000mAh Lipos.
As main computer there is used a Raspberry Pi 3 with Ubuntu Mate 16.04.
The motors are driven by two L298 connected to an ATmega32, which also
manages communication with the Raspberry, barrel detection, emergency
switch and the user interface with a 4x16 characters LCD and a custom
made keyboard. For obstacle detection a SICK PLS-101 is used. For
navigation there is a Ublox7-GPS module and a Bosch BNO055 IMU. For road
detection the robot uses a Logitech webcam (older model).
The software is programmed in C++. OpenCV is used for camera processing.
The navigation will probably be realized with a patched version of Navit, that
writes the waypoint data, generated from an osm-map, into a textfile.
Legendary Rover Team (PL)

|
- Distributed STM32's low-level control microcontrollers for hardware handling
- Software for microcontrollers written in C
- UART communication system
- 12V geared brushed DC mortors
- LI-PH battery pack
- Hokuyo Lidar
- Digital camera for image processing
- distance sensor for 2nd level obstacle avoidance
- GPS & IMU sensors
- Computer for autonomous task calculation
- Jetson TX 2 board
- PC software written in C#/WPF
- board software written in Python using OpenCV/Keras (with Tensorflow backend)
MART (CZ)

|
The robot chassis is composed of two independent halves connected by an axis.
This solution helps to better handle terrain conditions. The wheels are driven
via belts connected to two industrial stepper motors (one on each side,
i.e. robot is differentially driven). Motors are driven by control unit
attached to CAN network. The power source are two Pb batteries taken from UPS.
Robot is controlled by BeagleBone Black pair. It uses inertial unit, compass
and GPS. RangeFinder SICK LMS-100 and sonars are used for obstacle detection
and better localization. There is an extra carriage built for transport of beer.
Mota Sato (SK)

|
youtube https://youtu.be/aHV-bRCtK8E
HW:
- undercarriage: modified kids PowerWheels car, SLA battery 2x6V, 2xDC motor 550 drive + gearbox + Pololu encoders, Pololu Dual VNH5019 Motor Driver Shield, steering control 1xDC motor + gearbox + custom position sensor, Arduino Mega 2560, MPU-6050, 4x sonars HC-SR04.
The rest of the robot is still in under development. The plan is:
- Raspberry Pi 3
- Notebook MSI Intel i5, nVidia GTX950M, 8GB RAM
- 2x camera, probably some Android device with GPS + Tango sensor or Intel RealSense camera
SW:
Everything is currently still under development. We use Python, OpenCV for
image processing and evaluation of position in space.
MRVK (SK)

|
4-wheel differentially driven base. Whole robot is controlled via ROS. Sensor
set contains geodetic GNSS system, laser scanner Hokuyo, rotating camera head,
Kinect 2.0, compass, 6 DOF IMU.
ND Team (CZ)

|
youtube: https://youtu.be/MfTsp0Rwm8A
Robot Robík 2
Robot dimensions:
- length 84 cm
- width 48 cm
- height cca 40 cm, depends on payload and used sensors
- clearance of the base above the terrain 12 cm
- weight cca 25 kg
Used materials:
- welded frame from aluminium square tubes
Powertrain:
- differentially driven
- pairs of wheels connected with belts
- two motors GMP 56-60107
- Roboclaw 2x15 A controller
Power:
- 8x 5 Ah battery LiPol (29.6 V) in airplane-modeller (soft) setup
- light, high discharge current in case of need, reasonable drive time
Power for control electronics:
- 3S2P 5 Ah LiPol in airplane modeller (soft) setup (11,1V / 10Ah)
- separate from motors power
"Small brain" — custom design board CortexPilot (9 DOF AHRS, PID motor
controller…) extended by following peripherals:
- external GPS with magnetometer
- scanning LIDAR
"Big brain" — notebook with XUbuntu linux or SBC Odroid XU4 + 7" touch panel
display 1024x800. Communication with CortexPilot over USB.
Robosoft (SK)

|
youtube https://youtu.be/2PAaFqIR7W8
Robot NEURON:
PC for image processing: Intel core i7, 8GB Ram, 64GB SSD, built-in
wifirooter, power 12V, passive cooling. Image processing in Simulink.
1x Webcam, 1x GPS, 1x compass CMPS11, 3x sonars for obstacle detection, 1x
Sick lidar TIM310, 2x Motor 24V/250W, onboard volage 24V and 5V.
2x Arduino MEGA, 3x Arduino Nano
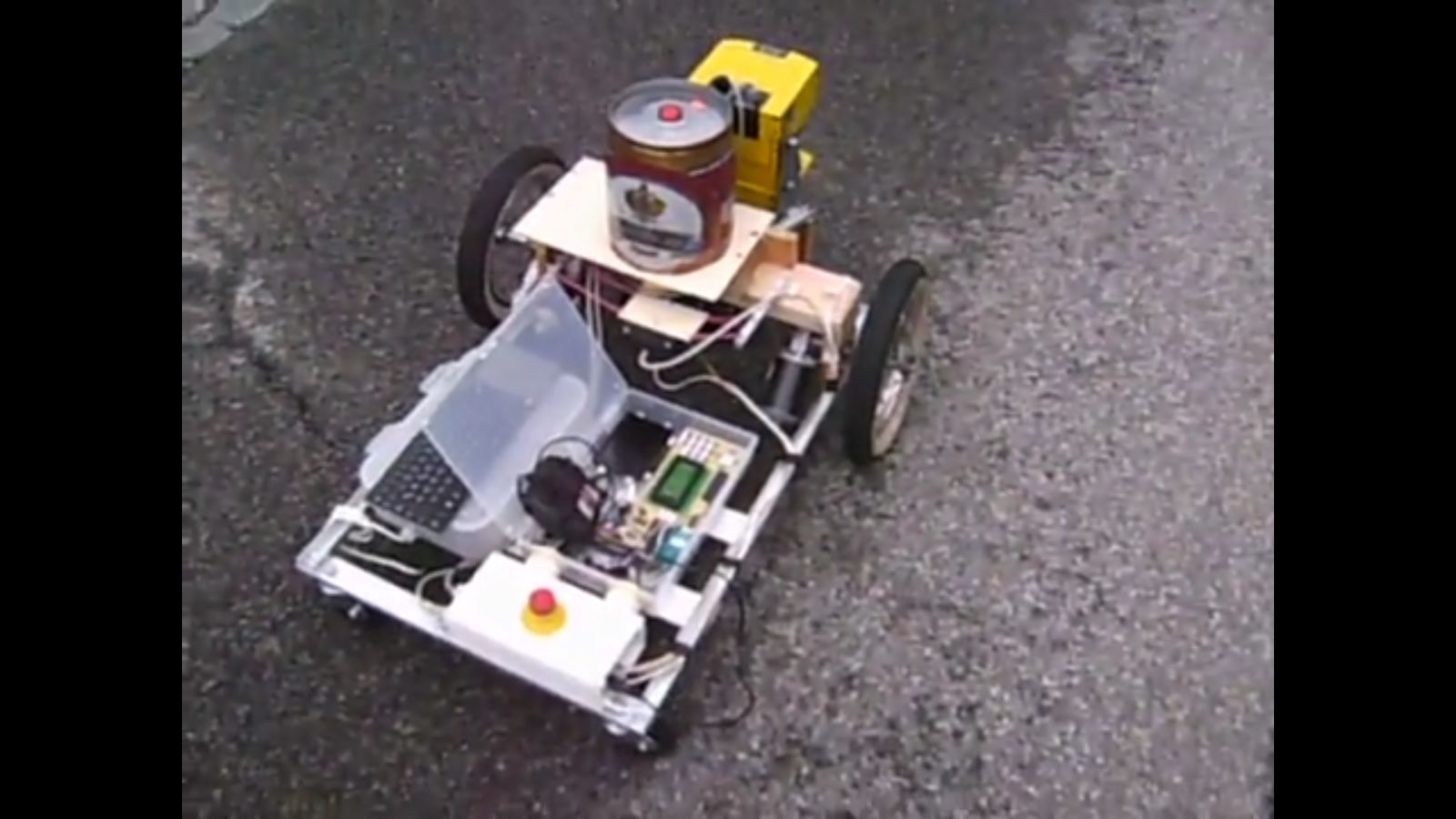
Smely Zajko (SK)

|
- Parallax (Motor Mount and Wheel Kit), encoders, 2xHB25 motor drivers
- Sbot board (based on AVR ATmega128, low-level control board) (might be upgraded)
- Sencor 3CAM 2000 outdoor USB HD camera
- 5x SRF-08 (ultrasonic sensors)
- GPS NaviLock NL-302U USB SiRF III
- Compass with tilt compensation (HMC6343)
- AVR ATmega8 (compass driver)
- usual usb hub
- Hokuyo UST-10LX
- RP Lidar A2
- Lenovo ThinkPad T430
- Power: HAZE HZS 12V 9Ah
- handmade wood & aluminium base
- red power switch and power circuitry
Short Circuits Prague (CZ)

|
Robot is based on monster truck model 1:5 platform. The main processing unit
is standard notebook with Windows 10. Hardware is monitored by Arduino
Duemilanove board. The robot sensor set contains magnetic encoder, compass with
tilt compensation, rear sonars (not active for this contest), lidar (oriented
down and hitting the ground approximately at 3m in front of the robot), GPS and
camera. Software is written in Python. Program receives latest information
about HW status via USB. Arduino collects this information, and regularly
sends messages to main program. These messages are then transformed into HW
independent structures.
PID speed controller, localization from odometry and compass, obstacle
detection and slope of road estimation from lidar data and also the main task
— navigation on input path, runs on the main computer. Robot uses structure
Occupancy Grid Map for fusion of inputs from various sensors and Vector Field
Histogram method for grid map navigation.
Technische Hochschule Deggendorf (DE)

|
youtube https://youtu.be/IEbfk26Huqs
The Robot is called "Black Jack", the chassis is made of wood.
Power train is based on four 24V DC motors with H bridges.
A microcontroller controls the motors and the emergency stop.
A Linux based computer is used for navigation and camera.
If you would like to somehow support this contest or you have some
comments/question, please use our standard contact form.