Je na čase začít dokumentovat úvodní krůčky mobilního robota „Kloubák”, který
vzniká na zemědělce (ČZU/TF). Přestože myšlenka kloubového podvozku je již
poměrně stará, teprve Jakub a spol. projekt uvedl do pohybu. A jsem za to moc
rád.
Blog update: 20/11 — Kloubák K2: zimní přezutí
První zmínky o „Kloubákovi” již na robotice najdete a to v sekci
soutěží (SubT Challenge). Plán
vytvořit si na škole (ČZU/TF) svého menšího
mobilního robota je již prastarý, jen nikdy nebyl dostatečný impulz, který
SubT Challenge zajistila. Univerzita je součástí
týmu Robotika a existující platformy jsou prostor tunelů nevhodné … je
čas experimentovat.
Proč kloubový podvozek? Na SubT testování v
dubnu jsme měli trojkolku Eduro a smykově řízeného
čtyřkolového robota Robík. Eduro nebylo
dostatečně terénní (i když hlavním důvodem byl spíše nízký výkon motoru) a
smykový podvozek není zase příliš vhodný na pole, což má být pro Kloubáka
primární aplikace. A konečně jsme v podzemí viděli krásné důlní stroje, které
kloubový mechanizmus používaly.
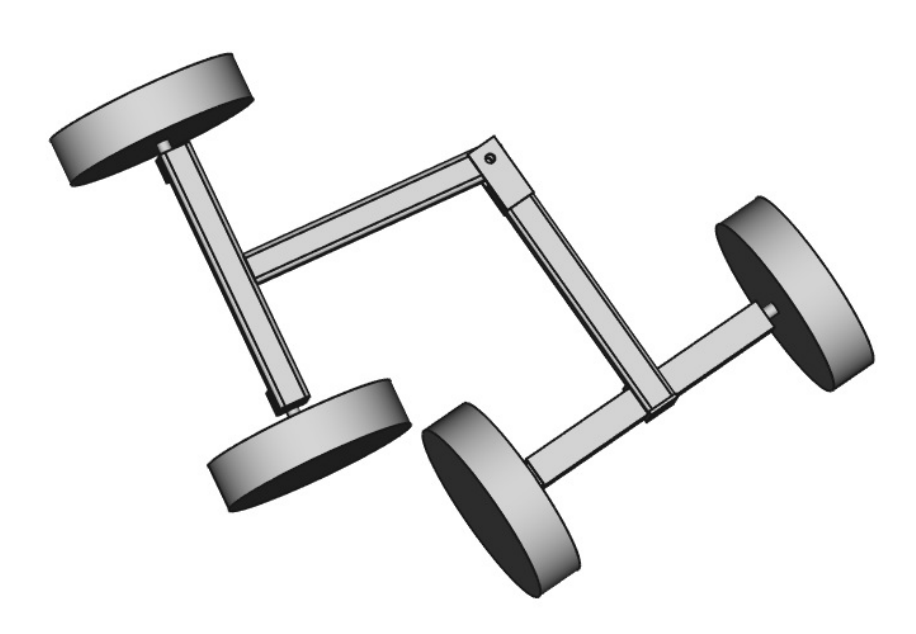
Návrh a konstrukce
Obrázky návrhu a první fotografie bych drze zkopíroval už ze
SubT 8/5 ať je to i zde …
Odkazoval jsem se tam ještě na pěkné kloubák-like video od Seqway z roku
2012: ARTI platform.
Soutěž „Robotem rovně”
Svůj první křest měl robot „Kloubák” v Písku na soutěži
Robotem rovně. Kloub byl fixován, aby měl pár
dní po vzniku vůbec šanci soutěžit (konstrukce je tak flexibilní, že i jízda
rovně není triviální záležitost). Řízení zajištovalo Arduino, které po CANu
posílalo dvěma vESC driverům (zadní kola nebyla zatím zapojena) příkazy na
proudové řízení. Arduino si dále hlídalo otáčky (zjednodušená verze PWM) a
brzdilo na STOP tlačítko. Robot ujel rovně 87m, což mi přijde jako užasný první
milník!
Asi další milník byl dosažen včera na „víkendovém robotickém soustředění”.
Studenti ještě v pátek zapojili všechny motory včetně Halových senzorů, vESC
drivery a druhou krabici „vzadu” s cílem udělat první testy s flexibilním
kloubem.
Na rovinu nebylo to lehké, přesněji psychicky to bylo dost vyčerpávající. Teď
po boji je už jasné co jsme měli udělat jinak, ale kombinace množství parametrů
vESC driverů, slabá/nevhodná baterka a nedostatek zkušeností s BLDC motory se
nějak projevit musel. Ale konec dobrý, všechno dobré … jenom jsme dočasně
opustili regulaci otáček přímo na vESC, revertovali na řešení z Písku (dva
motory táhnou a dva se vezou jako vozík) a při změně směru si to prohodí. Ale
pomalé rozjezdy a ta ladná přizpůsobivost terénu opravdu stojí za to.
Předpokládám, že s časem bude množství nahrávek s Kloubákem přibývat, tak bych
z toho rovnou udělal malý playlist (jedna nahrávka má typicky pár sekund).
Blog
3. červenec 2019 — Kloubák 2
Na světě je další Kloubák! Nevím, zda datum narození robota se počítá od
prvního autonomně ujetého metru nebo když už je hotová mechanická konstrukce s
koly?? Motivací pro jeho vznik bylo hned několik: Jakub nechtěl jet do států
s kloubem bez ložiska, já chtěl záložní variantu, když se něco pokazí, a
především se dvěma platformami je možné intenzivněji testovat a až tolik se
nebát dále experimentovat (nové baterky, nové APU4, PCAN interface a pod).
Minulý týden jsem se moc nerozepsal a nezveřejnil ani fotografie od Standy a
MartinaS. Takže bych dnes začal resty — „dokumentace” níže je z kalibrace
Kloubáka 1. Měl jsem v programu samozřejmě chybu ve znaménku, takže se přední a
zadní kola o sebe třela, ale pro neznalého pozorovatele to vypadalo, že robot
prochází samočistícím cyklem. Minimálně stopa byla následně krásně měřitelná.
Největší posun je ale pozorovatelný na druhém robotu — Kloubák 2, pracovně
označovaný jako K2. Tentokrát byl striktně dodržen plán, aby bylo možno
robota operativně rozdělit na dva (do letadla) a následně zase spojit. Zatím
je zprovozněna „přední” polovina (Kloubák nakonec není symetrický — předku
teď říkáme části s větší krabicí na elektroniku), je třeba zapojit APU4 (nová
verze se čtyřmi Ethernety) a udělat první test „ujet metr”. V rámci
modularity by mělo být možné snadno vyměňovat celá kola i s motorem, Hall
senzory i napájení používají konektory.
Mezi roboty jsou jisté rozdíly, kde asi nejmarkantnější je palubní napětí: K2
používá originální 36V baterie z kolonožek (hoverboardů).
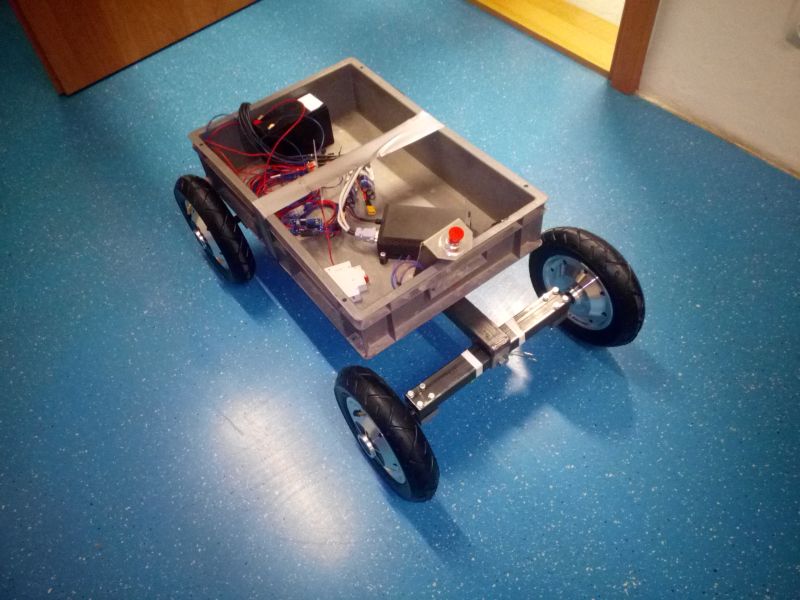
Nevěřil bych, jak k výrazné změně vizáže přispěje výměna pneumatik:
Tak ještě výměna potenciometru na měření kloubu za nový Hall sensor, Ethernet
kabel k zadní kameře za verzi se zámkem (stále vypadává), downdrop senzory
do všech 4 rohů a ideálně Real Sense s Jetson Nano na zpracování 3D
mapy … a pak by K2 byla teoreticky připravena na další cestu do států …

































{kind=link}








