|
Ichikaze — (いちかぜ / 一風)
Robota jsem začal stavět, protože mě v práci čeká podobný projekt a chtěl jsem si vyzkoušet jak se takový robot bude chovat. A taky už mi chybělo si s něčím hrát
Pojmenoval jsem ho s pomocí ChatGPT "Ichikaze" je to z Japonštiny kde Ichi = první a Kaze = vítr
Update: 14/10/2025 — Lodní fáze
|

|
Matty (dvojčata) — stavebnicový robot
Matty je další robot z dílny Martina Lockera s časovou známkou Listopad 2024.
Jedná se o čtyřkolového kloubového robota (zatím s pasivním kloubem) s pohonem na všechna čtyři kola.
Je to relativně malý robot, ale s velkými plány.
Blog update:12/9/2025 — Matty M04 a M05
|

|
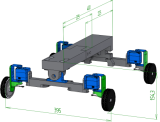
Rocker — terénní robot
Robota s nezávislým pohonem a řízením všech kol jsem si chtěl postavit již dávno.
Konečně jsem objevil vhodné pohony - robotická serva (WaveShare ST3215),
která splnila téměř všechny požadavky (a za rozumnou cenu).
A tak vznikl robot se čtyřkolovým podvozkem typu rocker-bogie.
Aktualizace: 24.7.2024 Jízda po naprogramované dráze
|

|
Pat (a Mat) — aneb zajíc v pytli
Vím, že písmeno P už bylo použité, ale pro (potenciální) dvojici pomocných robotů
mne automaticky asociovala dvojice kutilů z oblíbeného DIY seriálu.
Blog update:
20/10/2024 — Cones Challenge v1.1 (1h)
|

|
Paula — mini-drone proti trudomyslnosti
Paula je loňský model malé drony do dlaně. Je to hračka na doma za necelých 3kkč
od DJI a Intelu. Oficiální jméno zní Ryze Tello. Standardní použití je
řízení pres WiFi z mobilního telefonu, ale výrobce podporuje i oficiální SDK.
Tento blog je pro podobně praštěné, na které již to „domácí vězení” trošku padá
a potřebují rozptýlit. Blog update:
10/6/2023 — Tello go, go, go!
|

|
JECCbot mini — beginners robot for robotic competition in Deggendorf
We are constructing a beginners robot. This robot would allow the teams to have
an easy start to our contest and also the other contests. So we use only off
the shelf parts which everyone can buy and you don't have to solder very much.
It is based on Arduino. The main body is a 3D printed part. So everyone should
be able to print it by himself. We would also make the code available and give
instructions how to assemble the robot. And test the robot and components so
that everything fits together and you don't have to worry that your electronics
blow up or the motors are too weak.
|

|
Freyja — čtyřkola na SubT Challenge
Freyja je čtyřkolový diferenciálně řízený robot, který zatáčí pomocí smyku. Je
dílem švýcarského Cogito Teamu, který je jednou z „organizací” zapojených
do SubT Challenge Tunnel Circuit. Freyja vznikala 3 měsíce z nuly v jednom
člověku a je to až neuvěřitelné, že je to vůbec možné … tak mi přišlo líto to
nezdokumentovat! Update: 4/10/2023 — Freyja 2.0, jaro a léto 2023
|

|
Kloubák — flexibilní 4WD polní robot
Je na čase začít dokumentovat úvodní krůčky mobilního robota „Kloubák”, který
vzniká na zemědělce (ČZU/TF). Přestože myšlenka kloubového podvozku je již
poměrně stará, teprve Jakub a spol. projekt uvedl do pohybu. A jsem za to moc
rád.
Blog update: 20/11 — Kloubák K2: zimní přezutí
|

|
MOBoS — MOB na steroidech
Tak tělo nového MOBoSe je na světě. Tady je foto příběh…
Update: 2/6/2019 — MOBoS a ROS
|

|
Marina — projekt Roboloď
Projekt „Roboloď” pro mne začal na vánočním večírku 2015, tj. skoro před
třemi lety. Bývalý kolega z práce říkal, že jeho kamarád shání někoho, kdo by
dokázal zrobotizovat lodičku zavážející krmení do sádek na rybníce. Projekt byl
(a stále je) takový „tajuplný”, ale nakonec jsme se se dvěma dalšími kamarády
rozhodli do toho jít. Když nic, tak ověříme, jak se nám spolupracuje a na vodě
jsme s robotama ještě nebyli … Blog update:
8/9 — Vodní test 3
|

|
Spider3 Rider — Open Source Garden Autonomous Robot
OSGAR is a long term project which will probably incorporate more than one
robotic platform in the future. The project started in 2014 when we decided to
modify school garden tractor John Deere X300R into autonomous robot. The
project is carried on in cooperation with the Czech University of Life Science
Prague. Blog update: 25/04/2023 — Speed control (stop and go)
|

|
Lamia — Parrot Jumping Sumo v Pythonu
Jumping Sumo patří do rodinky MiniDrones, kterou Parrot představil loni. Na
rozdíl od Rolling Spider (Jessica) a Bebop (Katarina) nelítá, ale pouze
skáče. Robot dostal jméno Lamia a má stejný úkol jako Jessica loni: zdolat
schody na Tour the Stairs … jen je na to tentokrát pouze týden! Blog
update: 10/2 — END
|

|
Katarina — fandorama článek/blog
Další hračka od Parrotu, tentokráte čtyřtulka Bebop. Úloha je rozchodit
sledování barevné čepice, jako to uměla stará AR Drone 2. Na první pohled je
Bebop více profi — součastí balení jsou nahradní baterky, vrtule, GPS, full
HD kamera, 8x výkonější počítač, 14 megapixels “Fisheye” foťák, uživatelsky
polohovatelná kamera v intervalu 180 stupňů … no jsem zvědav jak to půjde z
Pythonu . Blog update: 21/4 — Skrytá kamera a Nao
|

|
Jessica — fandorama článek/blog
Mám cca na měsíc zapůjčenou novou hračku: Parrot Minidrone (Rolling Spider).
Primární motivace je udělat demo na soutěž Tour the Stairs v rámci
robotického festivalu koncem listopadu v Praze, ale proč tu "hračku" více
neprozkoumat? Blog update: 1/11 — pro nezájem čtenářů skončeno.
|

|
John Deere X300R — modified garden tractor into autonomous robot
OSGAR is a long term project which will probably incorporate more than one
robotic platform in the future. The project started in 2014 when we decided to
modify school garden tractor John Deere X300R into autonomous robot. The
project is carried on in cooperation with the Czech University of Life Science
Prague. Blog update: 26/03/2023 — web refactoring
|

|
Husky — fandorama článek/blog
Husky je komerční platforma od kanadské firmy Clearpath Robotics. Měl by se
stát aktivním pomocníkem na malé farmě, kde bude vysekávat trávu okolo
elektrického hrazení a pomáhat vozit materiál. Blog update: 5/6 —
Hello Husky!
|

|
FireAnt — fandorama článek/blog o stavebnici robota
FireAnt je stavebnice chodícího robota od americké firmy Orion Robotics. Jedná
se o šestinohého robota, postaveného z 25 (!) serv se zpětnou vazbou. Celý
robot je pak ovládan deskou s Arduinem. Blog update: 23/5 —
The Ant End
|

|
Heidi — audere, agere, auferre
Heidi je můj první, seriově vyráběný, robot, kterého jsem si koupil doslova
„přes ulici” (Tchibota před lety nepočítám, protože toho nemohu snadno svým
svým programem ovládat). Je to také můj první létající robot. Článek asi bude
vznikat celý rok, tak toto je jen „zachytné místo” s rozcestníkem.
|

|
Eduro — mobile robotic platform for education
Eduro is a modular mid-size mobile robotic platform suitable for high school
and university classes as well as for serious robotics research. In this article
we describe in more detail basic configuration with two driven wheels and one
caster wheel. This model was already demonstrated on several competitions
(Eurobot, RobotChallenge and Robotour).
|

|
PocketBot — a matchbox-sized line following robot
PocketBot project consists of three parts. The key part of the project is the
robot itself – a tiny line following vehicle of a matchbox size. Furthermore,
the robot is supported with an USB communication device and with a PC control
application. Altogether, these three parts form a complex solution to the line
following issue. Each part of the project will be described in this article.
|

|
Ferda a Fatima — roboti z Merkuru na Eurobota 2005
Ferda a Fatima je dvojice jednoduchých robotů řízených
jednočipem ATmega8. Naším cílem bylo ukázat, že i s jednoduchou
elektronikou a mechanikou (stavebnice Merkur) je možné se zúčastnit
soutěže Eurobot. Je to zároveň další příklad, jak by mohl vypadat Váš
první robot, pokud chcete začít s robotikou.
|

|
Ester — 4.místo v La-Ferté Bernard ve Francii na Eurobotovi 2004
Eurobot 2004 je za námi a pro ty zvědavé, které
zajímá, jak na takovéto soutěži dosáhnout čtvrtého místa, zde máme několik poznatků o naší
Esterce. V současné době zde naleznete články o manipulaci s míčky a řídícím software, ale
doufáme, že informace se s postupem času rozrostou (připravuje např. články o lokalizaci
či řízení pohybu).
|

|
Daisy — čvrtfinalistka Eurobota 2003
Daisy byl alternativní robot připravovaný na soutěž
Eurobot 2003. Daisy byla řádově jednodušší než
její sestra Dana a to se opět v soutěži ukázalo jako velké
plus. V celosvětové konkurenci dosáhla velmi dobrého sedmého místa.
|

|
Dana — 21.místo a cena za nejlepší koncept, Eurobot 2003
Dana je výsledkem našeho snažení věnovaného soutěži
Eurobot 2003. Poučeni z chyb a nedostatků
z již absolvovaných soutěží, je tento robot ještě dokonalejší a chytřejší ale
zároveň i jednodušší . Výsledkem je 21.místo a Best Concept Prize.
|

|
Barbora — pásové vozítko s barevnou kamerou a počítačem PC, 2002
Barbora byla primárně navržena pro účast na soutěži
Eurobot 2002. Další (a důležitější) motivací bylo
postavit univerzální podvozek, který bude sloužit jako základ pro další soutěže
a výzkumné projekty. Naneštěstí jsme robota nestihli dokončit včas, takže jsme
se do soutěže vůbec nekvalifikovali. I přes tento neúspěch jsme získali spoustu
cenných zkušeností a podvozek úspěšně slouží už ve třetí variantě robota –
Daně.
|

|
Clara — nejsnazší způsob, jak postavit robota
Clara je (měl bych říct byla, protože už byla rozebrána) robot postavený ze
stavebnice Merkur. Byla postavena pro soutěž Eurobot
2002 a byl to první robot nově vzniklého česko-irského týmu Short Circuits.
Cílem bylo ukázat, že i s minimálními prostředky lze postavit robota, který je
konkurenceschopný na mezinárodních soutěžích. Clara na soutěži Eurobot 2002
vyhrála cenu za
kreativitu
/ inovaci.
|

|
Cecilka — autonomní vysavač postavený na podvozku robota Barbora
Cecilka se narodila znovupoužitím podvozku robota
Barbora. Mechanismus pro manipulaci s míčky byl nahrazen
vysavačem (vyrobeným na zakázku). Cecilka byla základem druhého týmu
reprezentujícího Českou Republiku na uklízecí soutěži
Cleaning contest 2002 v Lausanne. Česká republika
tak byla druhá co do počtu zúčastněných týmů hned po Německu (šest týmů).
Ačkoliv Cecilka nebyla tak úspěšná jako Berta, získali jsme
spoustu nových zkušeností, o které se s Vámi rádi podělíme.
|

|
Berta — vysavač řízený mikrokontrolérem
Berta je vítězkou soutěže Cleaning contest
2002! To dokazuje, že nejjednodušší řešení je často zároveň to nejlepší.
Porazila totiž konkurenty vybavené laserovými rangefindery, kamerami a spoustou
výpočetní síly, protože prostě fungovala tak jak měla pouze za použití
čelního nárazníku a mikrokontroléru. Až budete příště stavět robota, určitě si
zjistěte, co je to „eXtreme programming”.
|

|
Alena — diferenčně řízený robot s krokovými motory a počítačem Palm, 2001
Alena byl náš první pokus o proniknutí do světa robotiky. Je to diferenčné
řízený robot s pohonem realizovaným pomocí krokových motorů. Nadstandardním
vybavením byla manipulační ruka poháněná modelářskými servy. Mozkem Aleny můře
být jakýkoliv počítač vybavený sériovým portem — od kapesního, který lze vzít
„na palubu” až po superpočítač. Robot se úspěšně kvalifikoval do soutěže
Eurobot 2001 a skončil na krásném dvanáctém
místě.
|