|
Ichikaze — (いちかぜ / 一風)
Robota jsem začal stavět, protože mě v práci čeká podobný projekt a chtěl jsem si vyzkoušet jak se takový robot bude chovat. A taky už mi chybělo si s něčím hrát
Pojmenoval jsem ho s pomocí ChatGPT "Ichikaze" je to z Japonštiny kde Ichi = první a Kaze = vítr
Update: 14/10/2025 — Lodní fáze
|

|
Matty (dvojčata) — stavebnicový robot
Matty je další robot z dílny Martina Lockera s časovou známkou Listopad 2024.
Jedná se o čtyřkolového kloubového robota (zatím s pasivním kloubem) s pohonem na všechna čtyři kola.
Je to relativně malý robot, ale s velkými plány.
Blog update:12/9/2025 — Matty M04 a M05
|

|
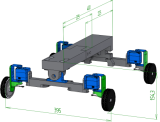
Rocker — terénní robot
Robota s nezávislým pohonem a řízením všech kol jsem si chtěl postavit již dávno.
Konečně jsem objevil vhodné pohony - robotická serva (WaveShare ST3215),
která splnila téměř všechny požadavky (a za rozumnou cenu).
A tak vznikl robot se čtyřkolovým podvozkem typu rocker-bogie.
Aktualizace: 24.7.2024 Jízda po naprogramované dráze
|

|
Pat (a Mat) — aneb zajíc v pytli
Vím, že písmeno P už bylo použité, ale pro (potenciální) dvojici pomocných robotů
mne automaticky asociovala dvojice kutilů z oblíbeného DIY seriálu.
Blog update:
20/10/2024 — Cones Challenge v1.1 (1h)
|

|
Paula — mini-drone proti trudomyslnosti
Paula je loňský model malé drony do dlaně. Je to hračka na doma za necelých 3kkč
od DJI a Intelu. Oficiální jméno zní Ryze Tello. Standardní použití je
řízení pres WiFi z mobilního telefonu, ale výrobce podporuje i oficiální SDK.
Tento blog je pro podobně praštěné, na které již to „domácí vězení” trošku padá
a potřebují rozptýlit. Blog update:
10/6/2023 — Tello go, go, go!
|

|
JECCbot mini — beginners robot for robotic competition in Deggendorf
We are constructing a beginners robot. This robot would allow the teams to have
an easy start to our contest and also the other contests. So we use only off
the shelf parts which everyone can buy and you don't have to solder very much.
It is based on Arduino. The main body is a 3D printed part. So everyone should
be able to print it by himself. We would also make the code available and give
instructions how to assemble the robot. And test the robot and components so
that everything fits together and you don't have to worry that your electronics
blow up or the motors are too weak.
|

|
Freyja — four-wheels for SubT Challenge
Freyja is four-wheels differentially driven robot, which turns with skidding.
It is work of Swiss Cogito Team, which is one of the „organisations”
involved in SubT Challenge Tunnel Circuit. Freyja was growing up for 3
months from nothing and in one person it is almost unbelievable, that it can be
done … so it would be pity not to document it!
Update: 4/10/2023 — Freyja 2.0, spring and summer 2023
|

|
Kloubák — flexibilní 4WD polní robot
Je na čase začít dokumentovat úvodní krůčky mobilního robota „Kloubák”, který
vzniká na zemědělce (ČZU/TF). Přestože myšlenka kloubového podvozku je již
poměrně stará, teprve Jakub a spol. projekt uvedl do pohybu. A jsem za to moc
rád.
Blog update: 20/11 — Kloubák K2: zimní přezutí
|

|
MOBoS — MOB na steroidech
Tak tělo nového MOBoSe je na světě. Tady je foto příběh…
Update: 2/6/2019 — MOBoS a ROS
|

|
Marina — projekt Roboloď
Projekt „Roboloď” pro mne začal na vánočním večírku 2015, tj. skoro před
třemi lety. Bývalý kolega z práce říkal, že jeho kamarád shání někoho, kdo by
dokázal zrobotizovat lodičku zavážející krmení do sádek na rybníce. Projekt byl
(a stále je) takový „tajuplný”, ale nakonec jsme se se dvěma dalšími kamarády
rozhodli do toho jít. Když nic, tak ověříme, jak se nám spolupracuje a na vodě
jsme s robotama ještě nebyli … Blog update:
8/9 — Vodní test 3
|

|
Spider3 Rider — Open Source Garden Autonomous Robot
OSGAR is a long term project which will probably incorporate more than one
robotic platform in the future. The project started in 2014 when we decided to
modify school garden tractor John Deere X300R into autonomous robot. The
project is carried on in cooperation with the Czech University of Life Science
Prague. Blog update: 25/04/2023 — Speed control (stop and go)
|

|
Lamia — Parrot Jumping Sumo v Pythonu
Jumping Sumo patří do rodinky MiniDrones, kterou Parrot představil loni. Na
rozdíl od Rolling Spider (Jessica) a Bebop (Katarina) nelítá, ale pouze
skáče. Robot dostal jméno Lamia a má stejný úkol jako Jessica loni: zdolat
schody na Tour the Stairs … jen je na to tentokrát pouze týden! Blog
update: 10/2 — END
|

|
Katarina — Parrot drone Bebop
There is another toy from Parrot — drone called Bebop. My task is to
prepare simple tracking of Parrot Hat (old AR Drone 2 could do that, so why not
the follower?). Bebop is more professional at first sight: extra battery is
part of the basic package, spare propellers, GPS, full HD camera, 8 time more
powerful computer, 14 megapixels Fisheye camera with user selectable ROI …
so I am quite curious how it will work from Python . Blog
update: 30/4 — Paparazzi?!
|

|
Jessica — indoor minidrone from Parrot
Parrot minidrone (Rolling Spider) is my current toy. The primary motivation is
preparation of a demo for the contest of autonomous robots Tour the Stairs
(part of robotic festival at the end of November in Prague). Anybody interested
in decoding communication before SDK will be freely available? Blog update: 4/12 — Parrot released ARDroneSDK3!
|

|
Husky — experiments with commercial platform
Husky is commercial platform manufactured by Clearpath Robotics. It is planned
to be an active helper on a small farm, where it will cut the grass near
electric fence and assist with material handling. Blog update: 3/6 —
dnipola.sk/Encoders
|

|
John Deere X300R — modified garden tractor into autonomous robot
OSGAR is a long term project which will probably incorporate more than one
robotic platform in the future. The project started in 2014 when we decided to
modify school garden tractor John Deere X300R into autonomous robot. The
project is carried on in cooperation with the Czech University of Life Science
Prague. Blog update: 26/03/2023 — web refactoring
|

|
FireAnt — fandorama článek/blog o stavebnici robota
FireAnt je stavebnice chodícího robota od americké firmy Orion Robotics. Jedná
se o šestinohého robota, postaveného z 25 (!) serv se zpětnou vazbou. Celý
robot je pak ovládan deskou s Arduinem. Blog update: 23/5 —
The Ant End
|

|
Heidi — audere, agere, auferre
Heidi je můj první, seriově vyráběný, robot, kterého jsem si koupil doslova
„přes ulici” (Tchibota před lety nepočítám, protože toho nemohu snadno svým
svým programem ovládat). Je to také můj první létající robot. Článek asi bude
vznikat celý rok, tak toto je jen „zachytné místo” s rozcestníkem.
|

|
Eduro — mobile robotic platform for education
Eduro is a modular mid-size mobile robotic platform suitable for high school
and university classes as well as for serious robotics research. In this article
we describe in more detail basic configuration with two driven wheels and one
caster wheel. This model was already demonstrated on several competitions
(Eurobot, RobotChallenge and Robotour).
|

|
PocketBot — a matchbox-sized line following robot
PocketBot project consists of three parts. The key part of the project is the
robot itself – a tiny line following vehicle of a matchbox size. Furthermore,
the robot is supported with an USB communication device and with a PC control
application. Altogether, these three parts form a complex solution to the line
following issue. Each part of the project will be described in this article.
|

|
Ferda a Fatima — Merkur robots for Eurobot 2005
Ferda and Fatima is a pair of simple robots controlled by microcontroller
ATmega8. Our goal was to show that even with very simple electronics and
mechanics (Merkur construction set, a czech version of Meccano) it is possible
to participate in the Eurobot competition. It is also an example how your first
robot could look like if you plan to start with robotics.
|

|
Ester — 4th place in La-Ferté Bernard, France, Eurobot 2004
Eurobot 2004 has passed and for the curious who
are interested how a fourth rank can be achieved at such a contest, we have
gathered some information about Ester. Right now you can find here articles
about the ball manipulation and the control software. We hope that the amount
of information will increase gradually (e.g. articles about localization or
movement control are in preparation).
|

|
Daisy — quarter-finalist of Eurobot 2003
Daisy was an alternative robot prepared for the contest
Eurobot 2003. Daisy was significantly simpler than
its sister Dana and again it turned out to be the most critical
point. Daisy ranked at the 7th place which is quite an achievement for such a
well known international competition.
|

|
Dana — 21st place and Best Concept Prize, Eurobot 2003
Dana is the result of our effort devoted to the
Eurobot 2003 contest. We have hopefully learnt
from the past mistakes (at least some of them). This robot tries hard to be
both smarter and simplier at the same time than our past bots . The result
is the 21st place and Best Concept Prize.
|

|
Cecilka — autonomous vacuum cleaner built on the Barbora bogie
Cecilka is the first reincarnation of our platform developed
for the Barbora robot. The ball collecting mechanism was
replaced with a custom made vacuum cleaner. This robot constituted the second
Czech team at the Cleaning contest 2002 in
Lausanne making Czech Republic second in the number of participating teams
right after Germany with six teams. Despite the fact that Cecilka was not as
successful as Berta we obtained many unique experiences that
we can now share with you.
|

|
Barbora — tracked vehicle with color camera and PC onboard, 2002
Barbora was designed primarily to participate in the
Eurobot 2002 competition. Another even more
important motivation to build the robot was the desire to build an universal
bogie to be used in the following competitions and to have a reliable
platform for further research and experiments. Unfortunately we have not
finished the robot in time to qualify to the competition. However it has shown
to be an excellent drive while building the robot and it has certainly helped us
to achieve what we have.
|

|
Clara — the easiest way to build a robot
Clara is a robot (I should say: “Clara was a robot”, because it has been
already taken apart) built completely from Merkur (Czech version of Meccano).
It was built for the Eurobot 2002 competition, and
it was the very first robot The Short Circuits team put together. The goal was
to show that even with minimal resources like Merkur you can still build a
robot, which can compete at an international competition. Clara has won the
Creativity
/ Innovation prize at the Eurobot
2002 competition.
|

|
Berta — vacuum cleaner controlled by microcontroller
Berta is the winner of the Cleaning contest
2002! It is the prove that the simplest solutions are often the best. It has
beaten its competitors with 2D range finders, cameras and a lot of processing
power simply because it worked the way it was supposed to using only a
front bumper and a microcontroller. Find out how eXtreme programming concepts
work while building a robot.
|

|
Alena — differential-driven platform with steppers and Palm computer onboard, 2001
Alena was our first try in the robot business. It is a differential-driven
platform powered by steppers with a gripper onboard. It can be controlled by
regular PC over serial line or by palm-sized computer carried onboard. The
robot has successfully qualified to the Eurobot
2001 competition in France and ended up at the 12th place.
|