JECCbot mini
beginners robot for robotic competition in Deggendorf
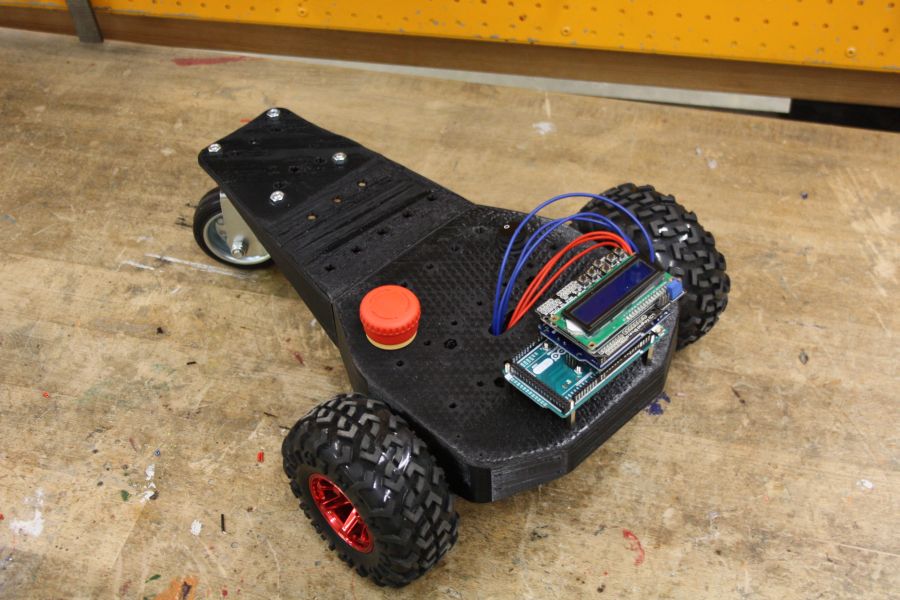
We are constructing a beginners robot. This robot would allow the teams to have an easy start to our contest and also the other contests. So we use only off the shelf parts which everyone can buy and you don't have to solder very much. It is based on Arduino. The main body is a 3D printed part. So everyone should be able to print it by himself. We would also make the code available and give instructions how to assemble the robot. And test the robot and components so that everything fits together and you don't have to worry that your electronics blow up or the motors are too weak.
 JECCbot mini |
The robot is based on an Arduino Uno or Mega and has a GPS and a compass
(BNO055) from Adafruit. So it should be able to drive 120 - 150 m in
Pisek. and I think this is a good start for a
new team. If the teams wants to get a better result they should improve the
robot by themselves and maybe attach a raspberry pi with a camera.
On 10/26/2019 2:54 PM, Bernhard Mayer wrote:
Our robotics platform JECCbot mini is now finished. At least the prototype
version. We decided to use 3D-printing for the chassis. We printed our first
prototype and were able to assemble it. We only had some smaller issues like
too narrow holes. We will fix these issues in the next days.
The chassis is 40 cm long and 20 cm wide.
The whole robot with ultrasonic sensors is depending on the wheels about 45 cm
long and 35 cm wide. Weight is about 1,5 kg.
You can find the data on github:
https://github.com/generationmake/JECCbot_mini
We also made a software based on Arduino Mega, suitable for
Robotem Rovne. It is also on github:
https://github.com/generationmake/Arduino_on_JECCbot_mini

|

|

|

|
|