SubT Tunnel Circuit
Robotika Team
The DARPA Subterranean Challenge is headed to Pittsburgh for the Tunnel Circuit, the first scored Challenge Event, in August from the 15th-22nd. Qualified teams will attempt to navigate a former operational mine in Pittsburgh, PA. … Update: 16/9/2019 — Photos Day 4
5th May 2019 — Here we go again … (102 days)
Well, there was not enough time for rest, I would almost say None!
Yesterday (maybe two days ago) DARPA announced the date and location for the
real compettition:
DARPA
SubT Challenge Tunnel Circuit Announcement (note, that you have to be
registered in order to see it). Beside the paragraph above there were details
about the mine and link to „motivation video”:
As part of the National Institute for Occupational Safety and Health (NIOSH)
Mining Program, testing in the research mine contributes to advances in
mining industry practices. In August, the mine will serve as the arena for
the SubT Challenge as teams compete to accurately map, identify, and report
the greatest number of artifacts along the mine passages.
https://youtu.be/un90P_Pa1F0
- NIOSH - Pittsburgh 626 Cochrans Mill Rd, Pittsburgh, PA 15236 (412) 386-6400 https://maps.app.goo.gl/BZ89kvMtmem54Jx87 … probably
I guess that there will soon also official announcement with the list of
qualified teams.
The Virtual Track is going to run in parallel. Note, that the deadline was
extended to 10th of June 2019. The score
board never-the-less still looks the same:

Robotika and two other (probably DARPA funded) teams are qualified and 13
teams are still with zero points … but they have 6 more weeks to go …
There were are some minor changes like we renamed team from Robotika.cz to
Robotika and made visible all our subTeams (including newly created
spin-offs):
- Robotika International
- Robotika.cz
- Czech University of Life Sciences Prague
- Centre for Field Robotics (in Czech Centrum polní robotiky)
- Cogito Team
When compared to STIX in April we are now
working on NINE platforms! … yes, that is totally crazy and I am quite
aware of the Second-system
effect. I suppose that by the end of May we will reduce this number to
half, and what survives will be duplicated for the trip to U.S.
Moreover there are new toys: inertial sensors from LORD, programmable laser
scanners TIM-P from SICK, and older 3D scanner from
Pulu Robotics.
Note, that there was a relatively long „prelude” period, which you can read at
Rules and
Prelude (both in Czech) and about
STIX in Colorado.
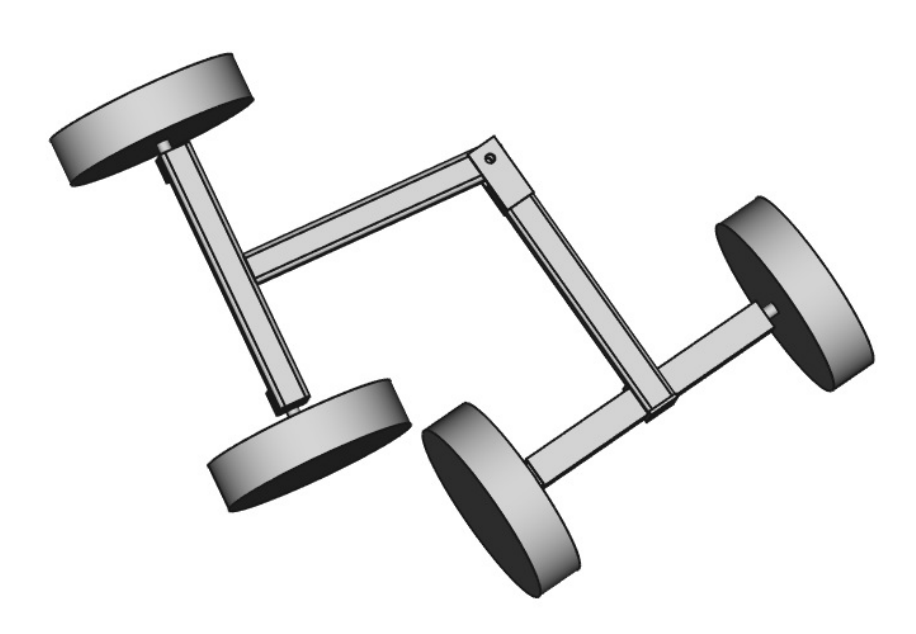
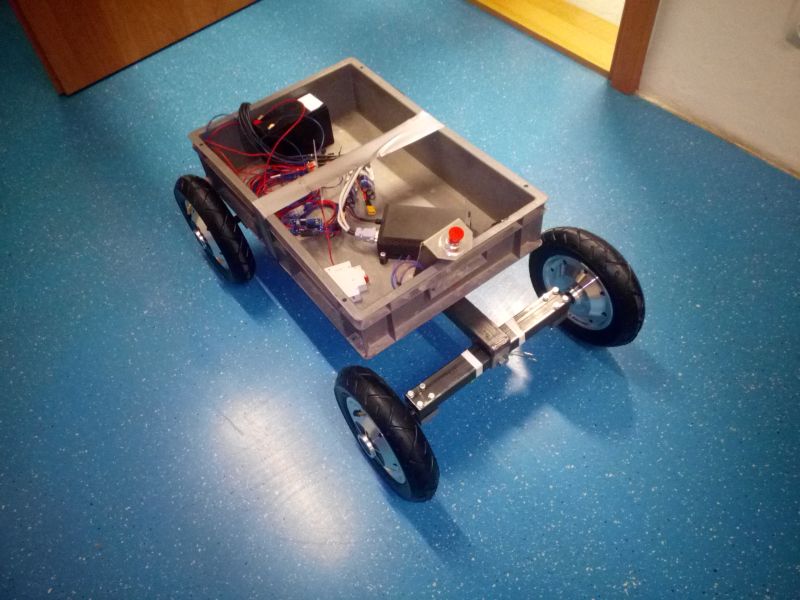
8th May 2019 — Kloubák — the student's platform … (99 days)
Yesterday I witness the very first motion test of new platform Kloubák (in
English „Jointer”, maybe). It was great to see the students at
the university (CULS) at work to finish the
minimalistic version to see the robot moving. Yes, we argued a lot, that they
should do it even simpler, but now it works, so I am happy.
There is an outdoor competition Robot go
straight in 3 days, on Saturday April 11th, so there is not enough time left.
Now there are two sets of power cables for BLDC motors to be controlled by two
(of four) vESC drivers.
I must admit, that the development was so far quite rapid (especially if you
take into account that some students have to finish their thesis, others are
working full time, etc.). The initial step did Jakub, sent his sketch what he
would like to build (mail dated April 20th) and the next weekend together with
Standa they build and weld the frame.

|

|
|




|

|

|

|

|
|
Later we found ARTI platform
developed by Segway back in 2012, so the plan is something similar.
p.s. this Jointer prototype should serve two goals: SubT and also as an
autonomous robot in the field
p.s.2 and here is small video proof
12th May 2019 — Kloubák at competition Robotem rovně … (95 days)
The robot „Kloubák” (articulated robot) went to its first competition
Robotem rovně (Robot go straight!) in Písek. It was the first milestone for
all platforms but only Kloubák and the CZU subTeam managed to get ready.
The central joint was fixed in order to simplify the robot control and it
helped. The robot reached 78 meters, and sure enough the students also tried
some terrain tests — so far it looks like the robot survived.
If you would like to see the wet video from Písek,
here it is.




15th May 2019 — LORD 3DM-GX5-25 sensor … (92 days)
There are a couple of small notes I wanted to write down, primarily for me and
my colleagues, but it could be useful for other teams too. One of them is
description of the first steps with new 3DM-GX5-25 sensor, which we received
from supporting LORD company.
The sensor is small (approx 2x3cm) and comes with two cable options: USB and
RS232. USB has advantage of power source while in case of RS232 you have to
provide it extra … but RSR232 is often more reliable and easier to integrate
in small embedded devices. So far I tried the USB cable option on Windows 7
only.

First of all you will need to install driver otherwise the 3DM-GX5-25 device is
not recognized. The next step is to install
MIP Monitor for configuration and
visualization of data. I would recommend it because by default is the sensor
silent, so you have to talk to it first in order to receive any data.
In order to integrate the sensor in
OSGAR library I had two
problems:
- checksum did not match
- selected types of messages had to be configured after boot-up
Thanks to great support from Barry both issues were quickly sorted out. The
checksum is computed in two separate bytes and both are stored (see
Fletcher Checksum
Algorithm).
Setting the configuration was more tricky — you have to switch also sensor to
running mode before you save the configuration! It make sense, as by default you
may want to change parameters before getting loads of data.
Here are the instructions:
MIP Monitor allows you to write your settings to the 3DM-GX5-25 non-volatile
memory.
By following this method, each time you power up the inertial sensor, the
settings will automatically actuate without any intervention by the host
computer.
As an example:
Launch MIP Monitor software and connect to the 3DM-GX5-25 as normal.
Click once on the 3DM-GX5-25 Model/Serial/etc. readout to highlight it.
Click Settings.
Click Load Default Settings and a confirming message box appears.
Click OK and the message box disappears.
Click Settings.
Click Device and the Device Setup window appears.
Click the Estimation Filter tab.
Click the Message Format sub-tab.
Select Attitude (Euler RPY) in the drop-down.
Select 100 Hz in the drop-down.
Click OK and the Device Setup window disappears.
Click Control.
Click Run.
Click Settings.
Click Save Current Settings and a confirming message box appears.
Click OK and the message box disappears.
Click File.
Click Exit and MIP Monitor closes.
Unplug the power to the 3DM-GX5-25.
Plug the power back into the 3DM-GX5-25.
Note that after a few blips of the green LED, the LED will begin blipping
rapidly, indicating that the 3DM-GX5-25 has initialized, and is now outputting
100 Hz Euler angles.
It works.
Barry also suggested hints regarding calibration and Auto Adaptive functions
… but I would postpone it when the sensor is mounted on the robot (which is
unfortunately not yet, and that would require another „report”).
p.s. I forgot the most important thing:
3DM-GX5-25
manual
21st May 2019 — DARPA E-STOP … (86 days)
Remote Emergency Stop (E-STOP) is one of the requirements for all robots
participating in SubT Challenge. DARPA has kill switch, which stops all
robots by broadcasting special command. All robots have to stop within 30
seconds and they have to demonstrate this behavior as a part of qualification
procedure.
The communication is based on
XBee
Pro 900HP radio module mounted on a SparkFun XBee
Explorer USB carrier board. The receiver operates on the 900 MHz ISM band,
which is problem in Europe (???) and it is probably the reason why it is so
hard to buy the specified device. For detail information see:
- Transponder_and_Emergency_Stop_Integration_Guide.pdf (Revision 1, March 25, 2019).
- XBee Pro 900HP Module Datasheet
- XBee Pro 900HP Configuration and Usage Guide
There are two options how to interface the E-STOP module. One is just to power
the board and use dedicated pin to trigger stop action. Alternative is to power
the board via USB port and talk to it. We used the second option at STIX in
Colorado — it was easier to integrate it into
OSGAR without HW modifications and beside
reset command (in the first option you have to power off the board once kill
switch was used) we could also use the board as transmitter, i.e. test and
demonstrate the functionality on our new platforms.
The binary communication protocol is still unknown for me — there is
obviously length of packet, address, checksum at the end, but what are the
internal codes I do not know yet (any hint is welcome). So short summary of
listed commands in DARPA specification:
7E 00 04 08 01 49 53 5A
query command to the XBee to get state of all enabled digital and analog pins
7E 00 0B 88 01 49 53 00 01 00 02 00 00 00 D7
XBee reponse in normal operation
7E 00 0B 88 01 49 53 00 01 00 02 00 00 02 D5
Emergency STOP also visible on DIO1 pin in HIGH state
7E 00 05 08 01 44 31 04 7D
Reset module — switches DIO1 to original state
7E 00 05 88 01 44 31 00 01
DIO1 Reset Success
7E 00 10 17 01 00 00 00 00 00 00 FF FF FF FE 03 44 31 05 6F
Master kill stop command (published on SubT community forum)
So is the protocol clear? It looks like the prefix is either 7E or 7E
00 depending on the size of length byte/word (8bit or 16bit). Then there is
the payload and one byte checksum.
>>> b = bytes.fromhex("7E 00 04 08 01 49 53 5A")
>>> hex(sum(b[3:-1]))
'0xa5'
OK, so at least the checksum is easy.
22nd May 2019 — 11 teams qualified for Pittsburgh! … (85 days)
There are 11 teams successfully qualified team for the Tunnel Circuit/System
Track in Pittsburgh — see the
official DARPA announcement.
You already know 9 of them from SubT STIX
blog: 7 DARPA sponsored teams, CTU-CRAS and Robotika Team.
So who are the 2 new teams?
- Coordinated Robotics
- NCTU: National Chiao Tung University, Taiwan
The DARPA announcement also contains teams currently qualified in Virtual
Track — there are 5 teams including Robotika (our score did not change
since successful 8 points submission
on 14th March 2019, and we focused on STIX and new platforms and sensors for
System Track in mean time).

Originally I wanted to claim, that „we are the only team participating in both
competition categories”, but it is not true. The other team is already
mentioned Coordinated Robotics surely leading by Kevin Knoedler. You can
lookup his history and it is quite impressive:
- https://spectrum.ieee.org/automaton/robotics/robotics-software/coordinated-robotics-winner-nasa-space-robotics-challenge The winner of the SRC was team Coordinated Robotics, which also was the only team to manage a perfect run with 100 percent task completion, taking home the US $125,000 top prize plus a $50,000 “perfect run” bonus. “Team” may be a little bit of a misnomer, though, since Coordinated Robotics consists entirely of one dude: Kevin Knoedler. We spoke with Kevin about his epic win, and also checked in with Nate Koenig from Open Robotics, which leads the development of Gazebo and helped organize the SRC, to get more info on the competition, along with footage of all the best outtakes.
But that was just the recent victory. Kevin has history even to very well known
Grand Challenge 2005 where he
participated in SciAutonics team (see
Google
Books) and later also in Urban Challenge
2007 —
post
from Oct. 28, 2007.
The updated competition schedule is on resources pages:
Operations_Guide_Tunnel_Circuit.pdf
(rev2). Based on this document the contest will be for all teams for the
whole week (from Aug 15th to Aug 22nd) and there will be four competition
runs.

Our goal is surely to win , but realistically to finish in the first
„smaller half”. According to the rules the first 5 places should be awarded
by prices, and somebody has to pay the bills … Virtual or System? BOTH
OBVIOUSLY!
Wish us good luck — the tunnel is coming in less then 3 months …
30th May 2019 — Freyja, MOBoS and TIM881P … (77 days)
There were couple of „small” updates last week. First of all
Cogito Team
shared the picture of new 4WD robot Freyja:
 Freja |
It is „a new baby” loaded with 4 cameras, stereo vision and enough power to
carry a human. The next step is finish cabling and exercise the first motion
steps say within a week.
 MOB 9 years ago |
The result is say impressive (take into account that this all was done within a
week?) and with NVidia Jetson Nano as the main computer and RealSense as the
mapping sensor we may expect cool tricks. Because of that we decided to create
separate article — see MOBoS photo-story.


There has been also some progress with articulated robot Kloubák, but it is not
ready yet. Last Tuesday we tested new sensors TIM881P from
SICK. You would not be probably able to find
anything, I guess, as these are new programmable prototypes. They combine
laser rangefinder technology (270 degrees field of view, 1/3 degree resolution)
with processor dedicated to user application. You can add extra data filtering
already on the sensor, provide alternative communication protocol or program
simple behavior directly controlling effectors.

7th June 2019 — 2nd testing in tunnel Josef … (69 days)
Yesterday Zbyněk, Jakub, TomášP and me tested robots Robík, Eduro and Kloubák
in tunnel Josef. Two of us (and
also two of robots) were there before, but nevertheless it was good exercise.
We were not prepared — surprise, surprise?? I may use excuse that the test
was planned by competitor team CRAS and
we just use this opportunity to meet and test our robots too, but … no, we
were not prepared.
Robík had slightly different configuration where the slope lidar was pointing
back with a plan to test scenario there and back again without turning,
i.e. return to tunnel entrance with backward motion. The code was not ready and
the new fish-eye camera generated cryptic message No space left on device.
If you would think that it was because of too much log files on the disk you
would be wrong. The reason, as Zbyněk later found out, was that the bandwidth
of USB does not contain enough „space” for newly connected device. The camera
runs at 120Hz and by default estimates the need based on plain data. In reality
it sends JPEG images, i.e. much much less. After some workaround it generated
tons of error/warning messages, so it is still issue to be resolved.
Kloubák was in the state as on Wednesday test: „Ahoj, udělali jsme s TomášemP
narychlo pár testů go1m přes prkno (cca 2.5 cm). Nepřejede.” Well, this report
made me quite angry, but what could I do. Also the IMU was not recognized by
embedded PC, and what showed in the tunnel, that even USB camera did not work!
Really really bad. So instead of testing in the tunnel we started to overcome
2.5cm board obstacle. The limit for motor current was removed (increased from
16A(?) to 75A), current from batteries was increased from 4A to 8A. The vESC
messages were still strange — they should report current but even when the
motors were blocked the current was only around 300mA?! We increased
the control current to 20A, and the robot finally overcame the obstacles.
You can see the evolution in the videos: limited
current, down and up hole test,
wheel in hole recovery and
meeting Husky robot.
Eduro was taken as „backup robot” and because the charger for Kloubák was
broken and there were no spare batteries it was time to collect some data with
the old tricycle. And it run through the tunnel nicely showing that it is actually
simple environment. Yes, it got stuck many times too, typically large (means
10cm high) rock, where insufficient clearance showed up. The CRAS team did also
some tests with fog, and it was funny trap for Eduro. We put it in the blocked
corridor and went in larger and larger circles as the vapor slowly
disappeared…



12th June 2019 — Virtual Track - starting from 9th position … (64 days)
Last night I checked the SubT Challenge
Virtual Testbed Portal for current Leader Board (the postponed
dead-line was June 10th, so the list of participants in virtual world should be
final):

and it looks like there are new competitors and we end up on 9th position! My
colleagues would surely argue that it is actually 4th-9th position as all
these teams have qualification minimum of 8 points.
There is a progress in the sense that there is a new dedicated machine for
simulations. But as I read the issues I am not sure if we should invest the
precious time now:
Is
the new simulator working for anyone?: We have been trying for the last two
weeks to get the new version of the subt simulator working (ignition). We have
tried on many different machines, and so far, we cannot figure out how to
connect to the agents and drive them around in the team.ign file. Has anyone
gotten this working on the new ignition system? It appears that the effort to
get our system ported from the gazebo9 system to the ignition system is going
to quite burdensome, but we can’t even start that yet because the simulator
doesn’t run for us.
I wonder if we should wait one more week as it will probably not be trivial to
port the code to the new ignition engine. BTW there are only 9 weeks left.
16th June 2019 — Churstenická šachta … (60 days)

Yesterday we visited Chrustenická
šachta (iron ore mine in village Chrustenice). It used to be one of the
biggest mines in the area west from Prague. It had 84 underground floors
reaching depth of 426m, which means 120m under the sea level! During the
hundred years of operation (1861-1965) there were extracted over 8 millions of
tons of iron.
Our guide was Miki Dobrý, who is behind the project to made this huge human
creation available to general public. The exposition is around 1km long, mostly
on the 8th floor, and on the way back you take the mine train. Very nice even
for family with kids.
We have not seen other deeper floors because they are flooded by acid water.
Imagine the incredible amount of this liquid! Yes, Miki had many great stories
including one related to future tunnel from Prague to Beroun, which should be
on the other side of the valley, but the mines underground are connected so
this water will surely cause problems … we will see, maybe. If I would ever
build an autonomous submarine then this would be the place to explore!
OK, so that was the nice part of the hot summer day, when we could practise in
the 8 degrees Celsius of the tunnel. So now the bad part. Our robots were not
prepared, I mean they would not be able to handle this tunnel even if they would
be more ready. We had three of them: Robík, Kloubák and small MOBoS. PavelS
wanted to return back home soon due to expected bad weather conditions (storm
and hail), so Robík did only quick test there an back and that was it. :-( I
would like to see the log files when available.
Kloubák was surprisingly in similar bad condition as last week in tunnel Josef.
The batteries were not fully charged and it was probably 75% source of the
driving issues. There were other discoveries: the translation Arudino board
between standard and extended CAN addresses lost some messages as the control
computer (APU) start to send commands. All four
motors talk at 100Hz and they also receive commands at 100Hz, which is probably
not necessary. It turned out that sometimes vESC
motor driver did not talk for the first 5s! Why? During restart we observed
that some were booting maybe two minutes, was this the case?
What was probably the biggest surprise was test in the tunnel (when batteries
were at least partially charged) and it showed that the wet air makes really
the difference! It was comparable to fog test in Josef, just here it was
unexpected:

It is funny that the real wall on the right is clearly visible but the ghost
surely wins and Kloubák wants to turn around.
And finally there many issues with USB, on all robots. Zbyněk managed to run
multiple cameras on his notebook, but I am not sure if that was also case of
robot Robík at the end. PavelJ fight with combination of USB3 needed by the
latest RealSense sensor on MOBoS (BTW two days ago he finally solved the
issue RealSense on NVidia Jetson Nano, so he was able to at least collect some
data in Chrustenice mine), and it did not work well with remote control and
badly jammed WiFi communication dongle. And Kloubák had problém with IMU on
boot, which is not necessarily related to power, as we thought on Tuesday, but
to old kernel?? IMU was talking to us but the data were constant … to be
analyzed today.

")
There is also a short video of Kloubák in the tunnel.
30th June 2019 — Kloubák and Freyja qualified, MOBoS pending … (46 days)
The robots Kloubák and Freyja are finally successfully
qualified for Tunnel Circuit! The video for MOBoS
PavelJ recorded at 3am and it is still in „pending state”. Officially the
robots qualification terminates tomorrow, July 1st 2019.
Tomorrow also starts the Virtual Track: The solution submission window for
the Tunnel Circuit will opened on 1 July 2019 and will close on 1 August 2019.
The submissions will then be evaluated and the final results will be announced
alongside the Systems Competition results on 22 August 2019.
DARPA also released preview of NOSH tunnel, where the robots will compete in
August:
11th July 2019 — Freyja and Virtual Nightmare … (21/35 days)
More than two months ago I was going to write a small report named Ender's
Game and Ignition Acropolis Release. By that time I was re-reading
Ender's Game (successful
sci-fi) and I was wandering why it so nicely correlates with SubT in my mind?
I tried to update my linux machine in order to match the latest
Ignition Acropolis Release and
then I realized what is the common feature … the teachers are the enemies and
they can change the rules and the Battle Room at any time.
While in the real world (System Track) you have to face the real problems:
connectors are not properly tight, batteries are dead, the water damaged some
boards, in the virtual world anything can happen. It is not only the basic
task, which is not trivial by the way, but you are fighting with alpha version
of the simulator, dynamically changing API and the core SW is still "under
development" even in the middle of contest period (ends on 1st Aug 2019).
The easy solution is to give up. There are 10 teams which passed the 8 artifact
qualification limit in former Gazebo 9 — I doubt that any team used the
Ignition version as it is still unusable. I must admit that it is very pity as
originally we used virtual world as practice area for SubT exploration and
mapping algorithms, but now it slowly turns into time and energy demanding
nightmare …
… so here are at least some good news from the real world — see Cogito's
robot Freyja driving through narrow corridors, including door video with all
sensors and map overview:
14th July 2019 — Updated Tunnel Rules and Operations Guide … (18/32 days)
The rules were updated yesterday (unfortunately on the community forum only …
hopefully they will propagate to
resources soon) —
SubT_Challenge_Tunnel_Rules_Rev3.pdf. Probably the most important change
is regarding the gate entrance. There will no longer be special frame, as it
used to be in STIX in Colorado, but the real tunnel portal will be used:


Also the detailed measures were published so when combined with the
preview DARPA video, you can get better idea
about the dimensions.
In the Operations_Guide_Tunnel_Circuit_Revision_3.pdf is preliminary
schedule of the competition days. The 11 teams will compete four times,
twice in each tunnel, and the better score from both attempts will be taken
into the final sum: For the Systems Teams, the final ranking in the Tunnel
Circuit will be determined based on the sum of a team’s top score on each
competition course. The highest scoring run on the Safety Research course will
be added to the highest scoring run on the Experimental course.
Other then that there is not much happening. The virtual world is unusable even for the simple
rostopic pub -r 20 /X1/cmd_vel geometry_msgs/Twist – '[0.5, 0.0, 0.0]' '[0.0, 0.0, 0.0]'
which looks like is related to extremely pure simulation speed. At least
Sophisticated Engineering UG confirmed that in virtual_stix the robot
can move but not in the other worlds. Hardly worth of comment. :-(
There is at least
schema, how the
simulation should look like available:

So each robot will have its own docker container and with a firewall it will
communicate to the main simulator.
21st July 2019 — Virtual too easy? Let's introduce launch changes … (11+7/25 days)

Well, the original title was „Virtual too easy? Let's add some randomness and
chaos at the staging area!”. Sigh. It is not the end of changes from, what it
looks like simple now, Gazebo 9 world to competition Ignition world. I did not
check if the robots are now at least a little bit moving
(#103: X1
and X2 basic motion), but in mean time Zbyněk discovered another game
changer
Will
the robots be spawned at any place in staging area and we need to detect the
entrance?. Originally I expected that I just missed something that my X2
robot starts next to the entrance, and that I have to look up how in the new
world define its position. Well, do you want to know the truth (or better to
say the current status week before the original scheduled end of the virtual
tunnel track competition)?
The robots are spawned randomly and you have to find the tunnel entrance
yourself!
Note, that in order to have „more fun” the entrance was like a large step, so
you would not be able to detect it by laser unless you try to drive over it
(see my post and screenshots
from Dec 2018). The old workaround was to „close eyes” and simply overcame
it with blindly driving straight until the gate appeared and you see left and
right wall as it is in the rest of the competition course.
The other joke is the random placement of the team of robots. Forget the simple
„keep left” and „keep right” strategy, because you will very probably avoid
your robot teammate. You can also end-up circling around the tent in the
staging area instead of exploring the tunnel.
Why are they doing this? It is not because of the money prize I believe but
because it is the simplest solution to their current design problems. Also in
System Track there are specific AprilTags to precisely identify the tunnel
entrance and (0, 0, 0) is the tunnel entrance. If you would like to use the
same schema then the robot would know automatically from requesting ROS topic
/subt/pose_from_artifact_origin in the staging area as it must anyway (to
know the offset of reported artifacts).
There is scheduled call with Tim (Program Manager, DARPA Subterranean
Challenge) on Monday 22nd (i.e. tomorrow) so we will see.
p.s. note
Team Configuration Tutorial
… to me it look like that I have never seen it before, but I was — it only changed
a lot recently.
23rd July 2019 — DARPA call, Freyja upside down, CYNET.ai (9+7/23 days)
Yesterday we had call with DARPA SubT officials: Tim, Viktor and 3rd person I
did not got the name of. Our talk was mostly complains that we used Virtual
Track as preparation for System Track, but now it changed into time and energy
sink. Nothing is really working and the SubT Docker Hello World is,
according to Viktor ready for download, but we did not get/found it yet.
Hopefully today.
Yesterday we also received regular weekly report from Switzerland. This time
with subject subtitle (The Good, The Bad, The Ugly). Robot Freya is strong
and can easily climb the walls, but does not hold there. For unknown reasons
the safety feature, preventing large tilt and pitch angles, failed to respond
quickly enough. The details are still part of investigation — one suspicion
is that there is a small lag in the system which turned out to be too long in
similar situations. The worst thing is that it landed on one of the SICK
programmable prototypes TIM881P and the hit probably broke it. The motor is no
longer spinning and the status report is:
$ (echo -e "\02sMN SetAccessMode 03 F4724744\03\02sRN SCdevicestate\03" ; sleep 5) |
socat STDIO "TCP:{IP_ADDRESS}:{PORT}"
sAN SetAccessMode 1sRA SCdevicestate 2
Finally we received nice e-mail from another competitor in Virtual Track:
CYNET.ai:
Hi, I'm from one of the other teams in the Subt challenge (virtual teams) -
CYNET.ai. From the issues, I understand you have similar problems to pretty
much everyone else - new Ignition simulation is buggy. I had a call with Darpa
today and I asked them to delay the competition since there's not enough time
(who knows when everything will be fully functional...). They said they'd
consider it, if other teams mention the same issues. So if you talk to them,
maybe you can request the same thing, to postpone.... Regards, Chris
I believe that DARPA will postpone the Virtual Track by another week, say to
15th August 2019, but not any longer. They have to run simulations of all
submitted Docker images, evaluate the results and announce them together with
System Track on 22nd August 2019.
24th July 2019 — Virtual Tunnel Circuit extended by two months! (8+7+60/23 days)
Today we received e-mail from Tim stating: The Virtual Tunnel Circuit
solution submission window is now expected to close no earlier than September
30, 2019, with a final date determination expected in the next few days.
The things are up-side-down now! It is no longer the top priority to
deliver at least something into virtual world but re-focus back on System
Track only which continues within the original schedule. I believe that our
German competitors could be a bit disappointed as they already bought the plane
ticket for the ceremony on August 22, but on the other hand I suppose that
everybody is somehow relieved that the „fight” will be more interesting in
September.
From the Robotika Team perspective of we may fully focus on System now, and
what is maybe even more important we may have more developers for Virtual Track
in September! Somehow it makes me happy, that now I have only one problem to
solve (System Track) and not two.
p.s. in mean time we exercise the latest Docker image, remotely via ssh-tunnel
(thank you MapFactor) to our GPU workstation:

gpu@gpu-desktop:~$ export DISPLAY=:0 gpu@gpu-desktop:~$ docker run -it -e DISPLAY -e QT_X11_NO_MITSHM=1 -e XAUTHORITY=XAUTH -v "XAUTH:XAUTH" -v "/tmp/.X11-unix:/tmp/.X11-unix" -v "/etc/localtime:/etc/localtime:ro" -v "/dev/input:/dev/input" --network host --rm --privileged --runtime=nvidia --security-opt seccomp=unconfined nkoenig/subt-virtual-testbed tunnel_circuit_practice.ign worldName:=tunnel_circuit_practice_01 robotName1:=X2L robotConfig1:=X2_SENSOR_CONFIG_4 robotName2:=X2R robotConfig2:=X2_SENSOR_CONFIG_4 gpu@gpu-desktop:~ import -window root Pictures/Image5.png
p.s.2 it looks like the proposal to align System and Virtual Track was accepted
— see the
Issue
#112 - Will the robots be spawned at any place in staging area and we need to
detect the entrance?. Also note that the placement is not random but in
regular grid with fixed offset to the tunnel entrance! Never-the-less
setting the origin to the tunnel portal should simplify it a bit more.
1st August 2019 — Two Weeks to The Contest
There are two weeks remaining to the first day of Tunnel Circuit SubT
competition. There should be „orientation” on Thursday August 15, Move-in
teams on Friday and on Saturday August 17 is already going to be our first
Scored Run. There is not much time left …
 Freyja SLAM |
So what is going on in meantime?
Robot Freyja is back and running again after the climbing-wall
accident. Many thanks to the generous support of SICK company for the fast
replacement of lidar TIM881P. The devices are already in production and by
default they are no longer pre-programmed with „Hello World!” old TIMxx
code sending scan data. This was in particular trouble for Cogito Team as they
are operating purely on Linux (AppStudio runs on Windows). Again it was quickly
sorted thanks to SICK developers.
Robot Kloubák has its „clone” nick named K2. It is
not identical copy, and to my surprise on the last Tuesday it was not only a
little bit wider but also a bit longer. I do not know the motivation but this
surely means that each robot must have its own configuration and calibration
file. The ordered batteries 42V, 4.4AH already arrived to the „U.S. base” so
it is clear that K1 will stay at home (you may see it at „Zemně
Živitelka” exhibition next week) and K2 will fly.

Yes, there are many dark sides to this decision: K2 autonomously moved this
Tuesday for the first time! It did not drive more than 100 meters in total so
far. Also placement of LIDARs (two TIM881P placed horizontally covering 360
degrees, fulfilling the symmetry requirement), cameras and lights is not
finished yet. There are some issues with Arduino CAN translator, new control
computer APU4A is fresh and besides loosing time (should be fixed ASAP) there
will be surely some surprises. Yeah, I should take it as a game and live with
the fact that K2 is going to have many „childish sicknesses”.
And what about Robík, Eduro and MOBoS? The Robík author was sick (this word
repeats here too often) last week which stopped progress on the new cover for
360 degrees scanner. The prototype is already printed and hopefully it will be
tested soon.
Eduro is without any change — it is now equipped with the newer board APU3B
to support the latest SW packages (scipy) used in the new gridmap and VFH
(Vector Field Histogram) code. And yes, it has the same problems with battery
and time as APU4A.
MOBoS — we will leave it at home in Prague, I guess. PavelJ will return in a
week and he may like the Cogito proposal for running Jupyter notebook on
robots as a servers and use browser for Operator Control Center, but the
chance is below 10%. Both robots Freya and MOBoS (running ROS) have huge
logs so it would take unreasonable just to copy the log files from robot to the
control center computer. We will see. The plan is that within a week we should
be
able to control
Freyja remotely, navigating in the basement in Switzerland.
 LoRa devices |
Maybe one more update regarding LoRa (Long Distance Radio). František
prepared 5 devices capable to receive and transmit short messages via radio.
They work for several kilometers above the ground and probably tens maybe even
a hundred meters underground. The used frequency is illegal in Europe and the
devices are in U.S. anyway so František prepared setup of 3 Raspberry PI
stations placed in and around his house in order to enable remote testing.
The goal is to place one unit in the control station and others on each
robot. The messages are automatically re-transmitted so if nothing else the
operator may know where are all four robots. There is also option to send
positions of automatically detected artifacts.
12th August 2019 — Pack your bags (and robots)!
It is time … I got this message from AirBnB (Reservation reminder -
August 13, 2019, Pack your bags!, It’s almost time for your trip to
Bethel Park.) and our flight via London to Pittsburgh is tomorrow. Are we
ready? No way
The biggest HW changes (yes, still) are on Kloubák K2, which is now equipped
with two SICK TIM881P for symmetric navigation, two IP cameras and two
lights.


[I am sitting at the railway station now waiting for my train to Prague. It is
hard to believe --- ,,České Dráhy'' is really expert! First of all they
canceled every second train, so instead of taking train at 21:04 I went for
later one at 21:34. But as I was approaching the station I have seen the
train leaving to Prague! That was around 21:25?! So I stamped my ticket and
waited. Shortly there was an announcement that my train will be delayed by 55
minutes! So if somebody will go for another train it will mis it by 5 minutes
too ... from this point of view SubT Challenge problems are just fun to
solve If nothing else then I have enough time to finish this last report
before we takeoff tomorrow morning … hopefully I will have all necessary
tools at home to take Eduro robot apart and prepare it for the trip and also I
hope I will wake up and not mis the flight …]
So where are we? Yes, the status. So Kloubák K2 is completed, I mean hardware.
Now the SW, sigh. Usually I would refuse to work on platform which is not ready
at least one month before the competition, but these times are changing
probably … and sure enough, there were/are problems. The first issue was with
lidar — there were self-reflections but I am no longer sure they were caused
by mounting bracket or position of the camera.
The second issue was reading of tachometer from vESC drivers. There is older
version 3.40 not supporting transmission of selected value so the whole
status is sent. And it is large (59 bytes) from the „CAN point of view”. The
message is split into nine messages containing 7 data bytes plus one extra
message with checksum. Multiply this by four motors and you will get higher
traffic … and this fails to be logged properly and the data are no longer
synchronized with the rest of the system. But if you record them separately
everything works … so there is some „magic” behind to be resolved over next
two (?) days.
The latest news from Freyja are also not great. First of
all it collided again at speed 1m/s … but at least she was slowing down and
only the holders were damaged, not the SICK lidars. SLAM will have to be 2D
only and the Z-coordinate will have to be „approximated”. Slowing down,
dropping features … which is maybe the way how it should be, right?
Robík did some in-house practices with following the wall using its symmetry,
rsync for synchronization of log files between robot and the base station
… and we will see.
Eduro is hopefully at home where I left it on Wednesday.
And that's it. Sigh. Excited? Originally I wanted to describe the different
strategies for Freyja, which is like „Google car” with many sensor and
logging 3GB per minute, vs. „OSGAR driven robots” (Robík, Eduro and Kloubák)
where the key is relatively small log file and 3GB should be enough for the
whole hour … but I should double check it. Due to the amount of data Freyja
collects there is no way to copy them first to the base station computer.
Freyja serves the data via Jupyter notebook as a server and operator uses a
web browser to assess it. OSGAR should use already mentioned rsync.
[I am sitting in the train now --- it left 22:32 so two minutes BEFORE next
scheduled train]
[22:38 I should not be exited about my train --- it will be terminated and I
will have to switch to another train! Now I am starting to doubt to catch
the last subway train at midnight ...]
14th August 2019 — U.S. Day 1
This is just a quick report for friends and supporters. Let's start with the
good news:
- all of us (7 people, 4 robots) are safe at nice house in Pittsburgh
- it looks like nothing was seriously damaged (not counting small twists and disconnected connectors)
- robots Freyja and Eduro collected „New World” some data
And now the bad news:
- the three ordered battery packs for robot Kloubák2 were bad or even fake?!
- Robík network is not stable
- the immigration fail to give Jirka business visa so he will have to try to fix it tomorrow at the airport (You will not be allowed on campus with an I-94 that shows a B-2 OR W-T (Tourists) class of admission.)
Standa, Jakub and Franta were searching local shops and bought some new
(smaller) batteries. PavelS was soldering connectors for Robík's batteries and
helping Kloubák. Freyja has now working E-STOP via DIO1 pin and Eduro has it
integrated now via USB (it turned out that we could receive the DARPA signal,
but we did not forward it emergency stop message). Also couple of LoRa
messages were transmitted from Eduro, but the receiver on Windows7 has some
issues as it resets the device on opening COM port (somehow it reminds me Arduino
behavior) … so it has to be sorted out, as otherwise autodetection fails.

p.s. I have had the first hand experience operating Freyja via Chrome browser
with Jupyter notebook page — it is kind of fun and also a bit scary if I
imagine what she is able to do. We will see in the tunnel …
15th August 2019 — U.S. Day 2

Today were all four robots moving and e-stoping. Surely, there were still
„devil's details”, like broken Hall's sensor connector on K2 front left
wheel, swapped phase cables on front right wheel, but these „minor” issues
were found and fixed.
A big surprise was
robik-subt-estop-190815_170135.log
test, when Robík was following the right wall but suddenly instead of turning
left it turned right and decided to climb the wall. There was manual
intervention (STOP button), but later we unblocked it, as robot recognized
dangerous pitch angle and returned to the base.

|

|

|

|
The detail analysis of the log file showed problem with 360 degrees lidar
index, which, probably due to some race condition in buffer access, was rotated
by 90 degrees. The buffer was corrected in the next few scans but that was
already too late. Funny enough this bug must be there in the code for years,
but did not show up sooner (or better to say the „emerging behavior” was
never that bad). So now PavelS is working on low level firmware patch.
What else? OSGAR driven robots could now use LoRa command GoHome
implemented early in the morning, but it was not properly tested yet and so it
is not merged in master.
Yeah, maybe a small detail — the contest officially started today! It
was nice to see Tim, Elissa, Viktor and others again. STIX surely helped us to
have better idea what to expect … but maybe not, we will see tomorrow, the
move-in day. Sure, we are here the „Aliens In Transit” and several people
had also problem with I-94 form (business vs. tourist … different stamp in
the passport and something else online … so our Jirka is not the only one).
Also people from Czech CRAS team, because of this problem, were going again
to Pittsburgh airport to find a paper on the doors saying, that you should call
somewhere and then they direct you to e-mail somewhere else … etc. somehow
it reminds me the beginning of the Hitchhiker Guide into Galaxy.
p.s. they must be really afraid of us — we will have our own escort service
…
16th August 2019 — U.S. Day 3 (Move In Day)
OK, today it will be only few pictures, as I am too tired and it is time to go
to bed. Tomorrow we are competing for the first time. In the lottery we got
number 4, which means Experimental tunnel and start time around 10am.
I will start with a „joke” with rabbit — see
video. This was recorded by robot Kloubák K2
testing following of the left wall …

And here is micro-sample of pictures from the move-in day:



17th August 2019 — DARPA TV - Subterranean Challenge Tunnel Circuit
Robotika Team starts today at 10:45 but the feed will be delayed for 1
hour … so for Czech Republic this means + 6 + 1 hour = 17:45 CET
Game 1 — Experimental Course
OK, Robotika Team first run is over … and it was not easy but we met our goal to score at
least one point!
Get Status
{"score":1,"remaining_reports":33,"current_team":"robotika","run_clock":3400.5}
As Murphy promised something will go wrong and it did. And it was an
unexpected nice trick — shortly before the start (in seconds) the power in the whole staging area went
out! Yeah, we have notebooks, robots have batteries so how can this be a big
deal?! Well, we also have a new router and a directional WiFi transponder which
handles all communication with our robots. I should write „almost all”
communication with „almost all” robots, because Robík was too often failing
in client mode so we use it as an access point instead. Further, OSGAR powered robots could send LoRa
messages to share position info.
So without power there was no communication and the robots could not be even started.
It was very very discouraging. Up till yesterday, we used direct AP communication
only but we changed it to go through the WiFi router to accommodate easier control of all 4
robots.
And the recovery took a long long time — the whole half hour we received to prepare again as
somehow the WiFi did not properly clear its state (?).
The official start moved from 10:45 to 11:15. The plan was to send
Freyja 20 meters just to test how it feels like. And
Freyja did not like the shallow water pools at the entrance at all. She moved 1
meter forward but then returned that she is too afraid to enter the tunnel.
And this repeated four times until we changed the plan to proceed with the
next robot.
Robík was more brave and ran there and back nicely with timeout set to 240
seconds. This quick check unfortunately did not discover any artifacts behind
the first hidden corner. We started the second Robík's run immediately and set
the timeout to 10 minutes … and that was the last time we have seen it in
this run. It got stuck trapped too close to a wall.
The next robot on the scene was Kloubák K2. Jakub suggested speed 0.4 m/s,
but it moved so slowly that I killed that before crossing the entrance line and
switched to 0.7 m/s. Much nicer! What was not nice was a detail that I did
not set the timeout value (!) and we were wondering how much that
actually was … 10 minutes. Yes, it was also the last time we have seen this
robot at the staging area as it got stuck at around 200 meters into the tunnel. Nevertheless,
thanks to the good WiFi connection we were able to download the logfiles and check for
artifacts … there was one, but it was a nightmare to properly establish its
position. Kloubák still has problems with odometry and processing/storing
tachometer data, so it is not reliable … probably priority task for
tonight??
I do not want to (I am even not sure if we are allowed to) publish videos and
logfiles as the setup is probably the same for all teams and the same will
repeat tomorrow for the second half of the teams. The same holds for detail
pictures from robots :-(.
At the end Freyja went for another trip (note that she always returned home,
but the odometry was not precise enough as the wheels were slipping. She ended
up 10 meters in the tunnel so we had to add „manual correction” for home
position.
Finally I wanted to send Eduro to double check the positions of artifacts —
we have seen at least two … but maybe my head was just getting dizzy. It was
already too late and Eduro got stuck on the rail again, so no extra point this
time. BTW nobody turned the light on it …


Status: 1 point and all 4 robots survived (knock, knock, knock). Let's get
ready for another muddy business tomorrow!
p.s. results from DARPA Twitter:

18th August 2019
See the official video DARPA
Subterranean Challenge Tunnel Circuit Day Two.
Game 2 — Safety Research Course
The second mine was interesting. I expected a lot of mud and deadly lidar
conditions, but it was not that bad. Or I should rather say that water and mud
was not that bad, but there were other „killers hidden in the darkness”.
Get Status {"score":1,"remaining_reports":37,"current_team":"robotika","run_clock":987.4}
Control center setup
Today, the setup was without any surprise. Everything went smoothly, each Pit
Crew Member already knew what to do. Today we used two laptops: Zbyněk's
linux machine for Freyja control (via Jupyter notebook), and my Windows 7 for
console terminals for robots Robík, Kloubák K2 and Eduro. It served also as
center for LoRa data collection (see next section for details).
LoRa — Long Range Radio
Today all 3 OSGAR robots „inherited” and integrated new functionality to
be potentially controlled via LoRa. There were only two commands implemented:
GoHome and Stop. The main motivation was that in the case like
yesterday, when Robík lost WiFi connection and we could still hear that the
poor robot having problems, we would have a chance to do something. Now we can send
Stop and the problems are over. [yeah, there is still a bug where if
you stop Eduro on the way out it first tries to turn 180 degrees … it
is on our ever growing TODO list].
The communication log is surely harmless to share, so here is
test-lora-windows-190818_142524.log
1 hour recording of all what robots and control center „discussed” over the
LoRa communication channel.
Some best quotes today:
0:19:36.938317 1 b'4|alive-534689\n' 0:19:55.799396 1 b'4|[3020, -4473, -8385]\n' 0:22:05.781830 1 b'5|alive-674082\n' 0:25:25.373246 1 b'5|[93104, 48744, -3523]\n' 0:25:36.281870 1 b'5|[93104, 48744, -3320]\n' 0:34:01.471765 1 b'4|alive\n' 0:35:51.222043 1 b'4|[27187, 13934, -14688]\n' 1:03:53.831283 1 b'2|alive\n' 1:07:44.485475 1 b'2|[-46996, -67139, -3010]\n' 1:07:54.444045 1 b'2|[-46996, -67139, -2968]\n'
Lot of fun, right? The first message at 19:36 is from Robík (#4) going
ready for action and the furthest point is approximately 5 meters away (note,
that the coordinate system is not aligned with DARPA coordinate system!). Robík
simply did not want to go into the tunnel and immediately returned to the staging
area.
Then Kloubák (#5) started but after 3 minutes got stuck approximately 100
meters (?) into the tunnel.
That was followed by the second try of revised Robík version at 34:01 but near the April Tags
(say 30 meters) it decided to go home again.
The last call at 1:03:53 after starting the LoRa base station was Eduro (#2)
and it got stuck at approximately 80 meters at the graveyard of robots.
Eduro kissing the earth
The last message from Eduro robot sounded scary:
0:03:47.016693 Roll limit triggered termination: (roll -20.1) 0:03:47.016693 Going HOME 0:03:47.016693 turn 90.0 0:03:50.133154 stop at 0:00:00.550812 0:03:50.133154 turn 90.0 0:04:10.141207 turn - TIMEOUT! 0:04:10.210226 stop at 0:00:00.069019 0:04:10.215868 Pitch limit triggered termination: (pitch -54.0)
… so the 10 year old robot was on a slope, recognized the problem but instead
of backing up it wanted to go home, turned and fell on its nose. Luckily this
situation now automatically triggers stand still and program termination.
Sigh, I did not check the SICK lidar yet …


Kloubák odometry
Today we collected detailed tachometer data from all four wheels to
improve the odometry (which cost us one point yesterday). Now it is computed as
it should be, from the passive wheels. Kloubák uses the original navigation
where only the front wheels propel the robot and the rear half acts only as a trailer.
And when the robot moves back both halves simply swaps their roles.

You can see that one wheel was in the air while all others were stationary.
This happened around the 3rd minute with distance say 100 meters (one tick is
approximately 1cm). So now we have nice data for the next revision.
Kayton camera auto-exposure
I almost forgot what was turned out to be the deadlies trick of this tunnel for us: bright lights but not
illuminated environment! All I could see from Freyja and partially also from
Robík Kayeton cameras was black and few ultra bright spots! Really hard to find
anything! Where again Kloubák and Eduro had superior performance mainly due to
much stronger lights.

p.s.2 Eduro SICK lidar survived
p.s.3 Kloubák K2 failed not because of the collision but because of bad CAN
message:
Traceback (most recent call last):
File "D:\WinPython-64bit-3.6.2.0Qt5\python-3.6.2.amd64\lib\threading.py", line
916, in _bootstrap_inner
self.run()
File "M:\git\osgar\osgar\drivers\kloubak.py", line 312, in run
self.time, channel, data = self.listen()
File "M:\git\osgar\osgar\node.py", line 23, in listen
return self.bus.listen()
File "M:\git\osgar\osgar\bus.py", line 104, in listen
getattr(self.node, channel)(dt, data)
File "M:\git\osgar\osgar\drivers\kloubak.py", line 249, in slot_can
if self.process_packet(data):
File "M:\git\osgar\osgar\drivers\kloubak.py", line 220, in process_packet
self.update_buttons(packet[2:])
File "M:\git\osgar\osgar\drivers\kloubak.py", line 140, in update_buttons
assert len(data) == 1, len(data)
AssertionError: 8
and yes, there was one button message 8 bytes long instead of 1 byte:
0:03:43.254717 2 [1, b'\x00\x00\x04\x1f\x00\x1f\x00\x7f', 0] 0:03:43.257067 2 [1, b'\x00', 0] 0:03:43.258182 2 [2, b'\xa0', 0]
(verified from PeakCAN separately recording vESC tachometer)
19th August 2019 — Day Off … maybe, maybe not
Today we had „day off”. Now I know that it was not meant to relax or recover,
but that DARPA needed some time to modify the tunnels! I feel much more
exhausted than during the competition days … so what are the news?
Robík is being reprogrammed to handle „Safety Research Course” start section
… just go straight and do not much worry about following the right or the
left wall. It is now equipped with new lights (we bought all battery
construction lights in both nearby Walmarts).
Freyja has also new light pointing to the sides and up. She is getting ready
for large exploration trip and she may not return, but hopefully she will. The
client interface is improved for indication which of four cameras sees
suspicious object, SW control of brightness post-processing, faster video
forward/backward motion etc.
There is no change on Eduro robot. It was used for testing LoRa Pause and
Continue commands for manual coordination of multiple robots near tunnel
entrance, improved virtual bumper for detection collision and WiFi scanner
for Cell Phone artifact.
We were asked by DARPA to provide collected data so now there are first videos
converted. The best view seems to be for recordings from Kloubák, so here are two
samples using rear camera:
- kloubak2-subt-estop-lora-190817_153854-rear-camera
- kloubak2-subt-estop-lora-190818_144311-rear-camera
p.s. yes, there is minor detail filtering out all suspicious CAN messages on
Kloubák … hopefully it will help and it will not die in the first few minutes
again …
20th August 2019 — Game 3: Safety First, right?
I must admit that our expectation today were quite high, or I should say that
at least my expectation were (now I would say unreasonably) high. Not only
that we will beat our previous score 1 point but maybe get 5 points as our
Czech competitor CTU-CRAS. Sigh, naive, very naive.
Shortly we did not score a point! We had only one indication of artifact but
failed to score its position. I cannot tell you which now, but you may guess it
… update tomorrow night.
So what went wrong? I do not know — maybe just the „treasure” is hidden
further in the tunnel and there are no easy catches?? Instead of black images
two days ago I had perfect contrast view from Freyja seeing every detail on the
wall, but I could not find anything (and yes, the automatic pre-selection
failed too).
Well, maybe I will mention the joke anyway … we changed report of artifact to
submit 3 positions at once. I added parameter -1 to keep the old behavior,
but …
M:\git\osgar\subt>python report_artf.py S 180 -2 2
usage: report_artf.py [-h] [–only-one]
{Survivor,Backpack,Cell Phone,Drill,Fire
Extinguisher,S,B,C,D,F} x y z
report_artf.py: error: the following arguments are required: z
Just be aware that negative numbers are interpreted as
parameters.
OK, so what else went wrong? First of all 360 degrees lidar is broken now:


We have spare lidar for Robík and it is already replaced — the robot is
ready for the last strike!
Kloubák K2 worked nicely … well, until it reached the problematic point as
the last time, decided that it is still a problem and returned home. Twice. The 3rd
time we tried the other side partially blocked by Robík and both robots collided
as the lidar plane for Kloubák is higher than for Robík … sigh.
Freyja went for a long trip (destination set to x=10km) but returned after
approximately 100 meters, as she got scared of sharp turn at T-junction.
And Eduro did not even get a chance today :-(. We all know that it would
probably fall over as two days ago.

- 23, 9, 9, 6, 5 … 2, 2, 1, 1, 0, 0 … so minimum is to score at least 5 artifact to have a micro chance for awarded place (if nobody else will score, which is also quite unlikely, right?) …
So what we will do tomorrow? We decided to have a fun: we will probably start
multiple robots at once, keep 10km and 10 minutes as minimal values as larger values
do not have much sense, but why not to try „random walk” and if there
is a problem on once side then to try the opposite wall? Maybe more LoRa commands: RWall
and LWall, maybe even with distance parameters?? Well, I need to sleep and
I can work early in the morning, so we will see. This is the last chance …
p.s. I am thinking about WallE command … what it could do? „Zoufalí robotici dělají zoufalé věci”
21st August 2019 — Game Over, Deprecate the operator!
It is over now. We have lost, at least from the score point of view, but it was
much more fun today! Only the operator is the one to blame … (too many
rude words). It is funny that as we walked towards the Experimental Mine and
chat with Mike about what we like and what could be improved, and we suggested
that in real disaster scenario would be more realistic to have at least two
people: Operator and Copilot. Two hours later, when we had problem to report
Cell Phone again after successful scoring of Fire Extinguisher I would
change my mind — !!Eliminate the operator!! (yeah, deprecate is maybe
nicer word). That would actually make my life easier … and System Track
would be closer Virtual Track again.
So let's rewind and start with yesterday night. Robík upgraded/replaced 360
degrees lidar, Jakub took care of Kloubák and added and tested code to slow
down when the joint angle is out of desired limits +/- 10 degrees (this was
shortly before the thunderstorm). I went to sleep. Freyja got new code with
vector field histogram more tolerant to perpendicular walls, tolerate now larger
roll angles and original safety rectangle was replaced by oval.
The strategy was similar to previous days except swapping order of Kloubák and
Robík, so Freyja first, Kloubák second, then Robík and at the end Eduro.
Kloubák K2
As usual, the code was really fresh so Freyja did not want to enter the tunnel
again. Jirka went to debug it and we started Kloubák. This articulated robot
had 1 hour old code which was reviewed only from log files, but at least the
basic was tested twice (ha ha ha) this morning in the garden. Whenever Kloubák
encounters problem (large pitch or roll, get stuck for 10 seconds in circle
smaller then 0.5 meter) it switches front-rear, moves for 2 meters with
increased distance from the wall by extra 20cm (it started today with 1 meter
desired distance from the wall) and it tries to go forward 4 meters along the
wall. If everything goes well then it returns to its original wall distance. If
it fails it tries another extra 20cm and repeats reverse and forward motion.
Then it gives up and tries again original distance. All is terminated by global
timeout set to 10 minutes today for all robots.
Freyja meets Kloubák
Freyja went the second. Sure enough she met robot Kloubák on its way back home. They
did not collide, but Kloubák was confused and completely blocked the tunnel
(perpendicular to the tunnel direction). Freyja evaluated situation to be too
complicated and decided to return home. She was still online so operator could
send command „re-try” and in mean time Kloubák was forced to move blindly
forward to make space for Freyja. And it helped, Freyja passed (maybe after 2nd
re-try).
Robík
Then Robík — new lidar had different timing and I have seen warnings, that
the scan is not reliable. Another re-calibration was needed (from 144ms, to
182ms, 190ms … 250ms final).
Eduro meets Kloubák
Finally Eduro — I wanted to see it moving and it was actually cool. It shared
the same code tested in the morning on Kloubák with increasing distance from
the wall, but the weak point is that Eduro is not symmetric and so it is not
1:1. To my surprise it went all the way to blocked Kloubák and couple times
got stuck on the rails, recovered and was heading home. But suddenly as Robík
was starting it turned sharp right into pool of water! (that's the devil's
detail we reviewed after the game).
Artifacts
So far so good? Awesome! (as Americans like to say) … maybe we forgot
something?? The artifacts! I re-processed detector running on Kloubák showed 21
images and WiFi-scanned detected Cell Phone:
python -m subt.check_phone Ykloubak2-subt-estop-lora-190821_155852.log 0:00:34.035534 PhoneArtifactFT -83 0:00:45.479972 PhoneArtifactFT -85 0:00:56.958820 PhoneArtifactFT -82 0:01:08.637661 PhoneArtifactFT -84 0:01:20.244273 PhoneArtifactFT -78 0:01:31.656184 PhoneArtifactFT -78 0:01:43.421268 PhoneArtifactFT -78 0:01:55.191406 PhoneArtifactFT -79 0:02:06.618603 PhoneArtifactFT -79 0:02:17.999966 PhoneArtifactFT -84 0:02:29.379054 PhoneArtifactFT -79 0:02:40.778966 PhoneArtifactFT -84 0:02:52.513556 PhoneArtifactFT -78 0:03:04.151822 PhoneArtifactFT -84 0:03:15.810386 PhoneArtifactFT -59 0:03:27.513408 PhoneArtifactFT -75 0:03:39.106487 PhoneArtifactFT -81 0:03:50.549879 PhoneArtifactFT -76 0:04:02.292117 PhoneArtifactFT -76 0:04:13.961007 PhoneArtifactFT -76 0:07:11.773538 PhoneArtifactFT -73 0:07:23.395250 PhoneArtifactFT -75 0:07:35.109542 PhoneArtifactFT -77 0:07:46.962463 PhoneArtifactFT -76 0:07:58.704235 PhoneArtifactFT -80----best: 0:03:15.810386 PhoneArtifactFT -59
Windows Live Photo Gallery — I love this program! I just realized what
went wrong!!! I opened the images in artf directory went through images,
noticed

Reported and Team Robotika scored 1 point. But the other images were also
converted but the program did not refresh so I have not noticed newer images
like:





Do not worry about the misleading names — we used detector from Virtual
Track before they changed the list of artifacts. Somehow it worked reasonably
for System Track filtering, so we used it.
Kloubák had seen 3 artifacts (Fire Extinguisher, Drill, Backpack),
and noticed Cell Phone on WiFi scan.
Freyja again …
Freyja moved much further and beside artifact noticed by Kloubák, she spot also
Survivor. Sigh. It is really sad that I reported only the very first Fire
Extinguisher and tried (unsuccessfully) to „guess” the position of Cell
Phone. So the last message was:
b'{"score":1,"remaining_reports":15,"current_team":"robotika","run_clock":3555.5}'
Could be easily 3 (the artifacts were clearly visible near the main line), sigh again.
The good new is that it would not help us anyway — see the results. If I
remember correctly we ended on shared 7th-8th place (the order depends on
report time, so it is 7th or 8th, not shared).
p.s. the worst thing today (so far) was the lost of the half of 15 minutes
Freyja logfile :-(. Jirka waited several minutes, but could not connect … and
the reason was that the robot was flushing the recordings … in total 1TB for
last 4 days.
Videos
- SubT Challenge - Robotika - Kloubak K2 (Day4) - front camera
- SubT Challenge - Robotika - Eduro (Day4)
- Robotika::CogitoTeam:::Freyja Driving into Coal Mine at DARPA Subterranean Challenge
Unlisted raw DARPA videos
- DARPA Subterranean Challenge Tunnel Circuit Day One
- DARPA Subterranean Challenge Tunnel Circuit Day Two
- DARPA Subterranean Challenge Tunnel Circuit Day Three
- DARPA Subterranean Challenge Tunnel Circuit Day Four
Final Results

Congratulation CTU-CRAS!
23rd August 2019 — Never laugh at live dragons!
..., Bilbo you fool!
Well, that somehow came to my mind yesterday after Jirka's presentation of team
Robotika. There were announcements of the first 3 places (CTU-CRAS got its
$200 000 cheque) and then the teams presented themselves: the technology used
and „SubT Lessons Learned” (15 minutes per team).
Jirka's talk was about complexity to deploy first responders systems and
that we are actually more prepared as we are forced to fit our robots in
checked-in luggage on the plane. We can pack it in less than hour and fly, but
the large robots require non-trivial transport and logistics. BTW assembly time
has to be also taken into account — Kevin, one man team Coordinated
Robotics, had quite hard problem to assemble all his drones when he flew to
Pittsburgh from California(?) … it took him 2 days(!) if I remember
correctly. BTW he received „prize” for the most robots per team member.
… and I almost forgot that we received „prize” (all bottom line teams got
some award) for the most distinctive robots … if nothing else it was nice
to see professional pictures of Freyja, Robík, Kloubák and Eduro.
The second comment was about our efficiency — that we scored more points per
invested dollar than any other team. However, what he did not cover is that we
can expect each additional point to be more difficult and expensive to get than
a previous point. Let's see if we keep the efficiency when, hopefully, we score
more points next time.
Jirka's presentation did not cover difficulty of the competition itself because,
frankly, we had not seen much of the mine at that point. Our robots did not
explore much of it. Even after visiting the mine (thanks, Kevin, for taking our
team members under you budget of allowed visitors!) after the presentations our
team is torn on the difficulty. On one hand, it was an environment with many
obstacles, water of unclear depth, mud and with some artifacts hidden so well
that even a person would have hard time to look for them, on the other hand, it
could have been even more difficult with ladders, running water, deep holes and
what not.
And that is almost the end of System Track - Tunnel Circuit story. Some
people are flying home today and the rest will visit U.S. premises and return
to Czech Republic on Tuesday morning.

28th August 2019 — Photos Day 0




















29th August 2019 — Photos Day 1

|













4th September 2019 — Photos Day 2
The second competition day we competed in Safety Research Coal Mine…












5th September 2019 — Photos Day 3
The 3rd competition day was again in the Safety Research Coal Mine. This
time we expected much better score then in Day 1 and 2, but instead we got 0
points! Robík 360 degrees lidar broke shortly after start and the robot hit the
wall in full speed, Eduro was not deployed and Kloubák 3 times did not find
anything interesting except broken Robík and several time finished in a small
alcove and returned home.















10th September 2019 — The Grand Truth
Today DARPA released
the grand
truth dataset for Tunnel Circuit in Pittsburgh. It is like getting the
map from Treasure Island.

There is also Tunnel_Artifact_Ground_Truth.xlsx Excel table of location of
all artifacts for both tunnels and two setups. The idea is similar to recent
RoboOrienteering, where there is precisely
measured set of potential artifacts locations and then they are placed or not.
With the map in hand it looks somehow very easy … to let's see:
1st Day, Experimental tunnel — reported location 1, backpack (67.316, -3.726,
1.906) … report was 66.7 -3 0 … I should not ignore the Z-coordinate!
Location 2, Fire Extinguisher at (102.473, 1.660, 2.919) … too far
2nd Day, Research tunnel — location 31, backpack (61.904, 1.399, 2.113) …
was it by time? 58 1 1
3rd Day, Research tunnel, everything was behind the T-junction, 0 points
4th Day, Experimental: again Fire Extinguisher at location 2 (102.473, 1.660,
2.919) this time it was reported correctly, missed Drill location 3 (124.958,
-2.697, 2.664), Backpack location 4 (155.009, -6.043, 2.942), and more …


















{kind=link}