SubT Virtual Urban Circuit
Robotika Team
In parallel with System Track Urban Circuit starts also Virtual Track. This time we will keep two separate threads/blogs although they are connected — one team Robotika. While System Track is still "big unknown" for Virtual Track is already qualification world prepared, so let's have a look … Update: 5/3/2020 — Virtual Urban Worlds
Information from
community
forum (registration required):
Qualification for the Virtual Urban Circuit will require submitting a docker
solution against the Urban Circuit Qualification scenario through the Tech Repo
(https://subtchallenge.world/compete). In order to qualify, a team will
need to submit a docker solution that is able to successfully report at least
five of the artifacts within one hour of simulation time. Teams may submit
against the Urban Qualification scenario as many times as they choose until the
deadline for the Virtual Urban Circuit qualification, January 3, 2020
AoE.
Tunnel Circuit Virtual Teams,
We hope your fall is going well. This is a notice that your team has received
a Team Qualification waiver for the Urban Circuit of the Virtual Competition
based on your successful participation at the Tunnel Circuit event.
However, please stay tuned for the upcoming release of an updated
Qualification Guide. We do plan to release additional guidance related to team
registration and additional requirements.
We look forward to your continued participation in the SubT Challenge!
Content
- Virtual Urban Circuit Environment Preview
- Ver31 - AWS logging
- Ver33 - First point on AWS, Urban Practice 1
- CloudSim final release, new robot configurations and Ver36 with depth data
- Urban qualification is closed now
- Virtual Urban Circuit Qualification Results
- Vent, Ver48, RTAP-Map and Urban submission window
- The Day Before Last Day
- Robotika final submission
- Virtual SubT Urban final results
- Virtual Urban Worlds
10th October 2019 — Virtual Urban Circuit Environment Preview
Here is our first test in Simple Urban 01 world with ver25 from
Tunnel Circuit with exploration set to 120s:
https://youtu.be/FJ95uL_KYq4. PavelJ is already working on new
configuration for robot X2 with lidar and RGBD camera, which looks
promising: https://youtu.be/e-0GVTE35BA. We are currently waiting for
official documentation on
how
to add new configuration.
|
|

|
2nd December 2019 — Ver31 - AWS logging
OK, it is time for some updates …
- Robotika sent Letter of Intent to Participate in both System and Virtual Track of Urban Challenge (confirmed on Nov 22nd).
- there is Ver31 which is now successfully storing OSGAR logfile via /robot_data topic (200670743174.dkr.ecr.us-east-1.amazonaws.com/subt/robotika:ver31)
- the code is merged into master.
Any details? Well, there are some … for example we are not sure when it is
guaranteed that the ROS bag recorder is ready
(#276)?
Also the version on AWS is more than 2 weeks old
(#271).
No, the version numbering is not available (yet?)
(#256),
so the only hint is output from simulation:

How we can tell? Well the entrance should be to the right so that robot X
coordinates on staging area are negative. This was fixed and docker images are
available, but not on AWS.
As a side-effect we found a bug:

Local planner selected as next goal (nearest to the goal) position behind the
wall and end-up in local minima. Forever.
Just for reference here is the leader board:

Simply the leader board for Urban worlds is not working yet … maybe
tomorrow? It is deadline for teams registration for System Track and only one
month is left to Virtual Track (Jan 3rd 2020).
p.s. note Deleting Pods With no errors — I guess that this is result of
huge logfiles. As a test I tried simulation of 5 robots of different types.
7th December 2019 — Ver33 - First point on AWS, Urban Practice 1
OK, we have now one point in Urban Practice 1 testing simulated
environment.


It is backpack and in order to find it there were needed three
changes:
- disable collision detection — it simply does not work and crossing the entry gate causes several g reading. Moreover it looks like the organizers do not plan to fix this (see #243).
- slow down turn from 45deg/s to 20deg/s — basically the same topic as above but the problem is odometry on X1 (large, Husky like) robot
- classify all red objects as Backpack — in Urban Circuit is no Drill or Fire Extinguisher and new objects Vent and Gas are not red.
Here is the map from local run:

And meantime AWS simulation was completed with HD camera (X2 config 4), so here
is nicer video what robot discovered.
25th December 2019 — CloudSim final release, new robot configurations and Ver36 with depth data

There are some news since the last blog update, in particular new CloudSim
version with new robot configurations are available now on AWS — see
SubT
Release Notes & Updates (2019-12-20). Note, that this should be the final
release for Urban Circuit, no more
modifications a
day before the competition end. We will see!
There is one close deadline: Qualification ends on Jan 3, 2020, i.e. in 9
days. If you check the scoreboard
Urban Qualification then you can tell that new teams will have a hard time!
Robotika is „leading” with zero points at the moment and you can see
two new teams TunnelVision and Map Quickly. The team OSRF SubT
RedTeam I believe is just testing team of the organizers and it will later
disappear. If you want to qualify you have to score 5 points, and in particular
you have to be able to navigate on the railway to next stations where are
artifacts hidden. Definitely not easy task. The old teams from Virtual
Tunnel Circuit have qualification waiver so that is the reason they do not
worry much … (yeah, including robotika, but … if you are not able to
qualify how you want to win?!).
The new logging system seems to be working fine, so I was able to download logs
from two robots A10F300L and B50F300R,
200670743174.dkr.ecr.us-east-1.amazonaws.com/subt/robotika:ver36. BTW I
like the new info feature

The results were not great. I am not able to extract log for robot A at the
moment, but that could be an issue on my side (work in progress). And what
about B robot? See some pictures from RGBD camera with 640x360 resolution (BTW
that was another „lost case”, because this sensor should simulate
RealSense2, see
#295,
but Resistance is useless,
sigh).
|

|

|
|

|

|
The robot detected a problem on the stones:
0:09:06.926151 Pitch limit triggered termination: (pitch 26.5) 0:09:07.041879 maximum delay overshot: 0:00:00.115707 0:09:06.926151 Microstep HOME 0 248.373 pitch_limit 0:09:06.926151 go_straight -0.3 (speed: 1.0) (-67.239, -76.255, 0.105)
… backed-up 30cm and tried second side to exit this suspicious area. It
worked, but … then it ended in endless loop:

… until it decided that it is time to go home.
To be continued.
5th January 2020 — Urban qualification is closed now
Yesterday (Jan 3, 2020, AoE, i.e. noon Central European Time Jan 4) was
deadline for Virtual Urban Circuit Qualification. And the result? See
Urban Qualification Leader Board:

In short it is not good for new teams: No team reached limit 5 points! There
was a request to extend the deadline or lower the threshold on the
community
forum (restricted access) and the DARPA answer was:
The Virtual Urban Circuit qualification deadline and threshold will remain as
outlined in the SubT Qualification Guide. We understand the challenges of
autonomous navigation and artifact detection in these environments are
difficult and require significant development time. You are encouraged to
continue developing and submitting your solution to the Urban Qualification
world and note there are more opportunities to compete in the Cave Circuit and
the Final Event.
I agree that it is very hard to get some points in Urban Qualification
world — see SubT Virtual Urban Qualification -
1st point/video. The point was collected by big wheeled platform X1 with QVGA
camera (320x240) and 5 meters range lidar, the weakest sensor configuration.
The motivation for X1 was large wheels so that it can overcome the bolts
holding the rails. Note bad orientation on the rail, probably caused by the
robot tilt (I hope). Also note, that the robot had to go all the way to the
next station to be able to turn — it is not possible to do it safely on the
railway. Yes at the final stage, when the robot is supposed to navigate on its
own path, it failed too. The robot did not climb back to the platform.
Nevertheless robot reported the artifact and the wall to base station was not
too big so it scored 1 point!
The next attempts were with ROBOTIKA_X2_SENSOR_CONFIG_1 configuration
(robot X2 with RGBD camera 640x360). Here the robot has to enter the rails very
precisely to be able to explore it.

BTW robot X2 has sometimes problems to even turn on the platform — the wheels
are narrow and they can get stuck in small gaps.
There were several versions since my last report and I did not properly document it :-(
- Ver37 — experiment with depth2scan (conversion from RGBD image to be part of the lidar scan), optimization of Local Planner (it was too slow for this combination)
- Ver38 — navigation along a trace (polyline) to explore the station platform. Cell phone detection. Scored 1 point in Practice2/video. Collected some data how to fall down from platform/video.
- Ver39 — navigation down to the rails, scored one point in qualification world. Collected data of railway.
- Ver40 — simulate slope lidar from RGBD depth image. Detected discontinuity and enhanced lidar scan by detected rails. Targeted to small X2 robot.
The final run was with five X2 robots and there was no happy end:

Well, we (robotika) are qualified thanks to waiver from Tunnel Circuit
but there is a lot of work needed to successfully score in 25 remaining days to final
submission!
8th January 2020 — Virtual Urban Circuit Qualification Results
OK, now is the qualification disaster
official
(restricted access):
Congratulations to the 8 teams who qualified for Virtual Urban Circuit! These
teams provided narratives and had received score waivers for successfully
submitting qualifying solutions to Tunnel Circuit. The teams competing in
Virtual Urban Circuit are:
- AAUNO
- BARCS
- COLLEMBOLA
- Coordinated Robotics
- CYNET.ai
- Flying Fitches
- Robotika
- SODIUM-24 Robotics
We appreciate the new members of the SubT Challenge community who made
significant progress with their solutions to the Virtual Urban Qualification
world. We hope you will continue development to qualify for Virtual Cave
Circuit and the Final Event.
Also the list of teams is now
up-to-date (it seems to me that there are no new teams in both tracks).
25th January 2020 — Vent, Ver48, RTAP-Map and Urban submission window
OK, it is time for a short report and check where are we now? I would
start with review of new robotika releases:
- Ver41 — navigate first part via Trace for more reliable gate entering
- Ver42 — limit size of ROS bag to 2GB (simulation limit for user logfiles) so that we do not lose the beginning of the recording, depth2scan (detect large changes as obstacle)
- Ver43 — reduce reporting false artifacts as Backpack (more strict criteria)
- Ver44 — integrate Gas detection and reporting as artifact, use for app.pose2d global (unified) coordinate system
- Ver45 — integrate vertical_scan from depth camera
- Ver46 — parameter tuning for depth2danger to avoid wooden pallet for example
- Ver47 — integrate depth2dist much more dense RGBD camera filtering
- Ver48 — implement and integrate down-drops detection
Here you can see collected map all all five robots testing Ver47 in Urban
Practice 3. You can notice several „details” like that some robots returned
and navigated around start area (it was robot A for couple of times), sometimes
the position is shifted (i.e. wrong) due to lost odometry readings on heap of
stones or a wooden pallet, some robots ended in infinite (or almost infinite)
cycles, and some lost position (probably stuck on some obstacle, or they ended
up-side-down).

Note, that this overview picture is quite useful for analysis. Imagine 5
robots exploring the world for 1 hour. In total around 10GB of logfiles to be
reviewed for changes and errors. Believe me — it is quite time consuming task!
If you would like to try it use osgar.tools.log2map which now accepts also
multiple logfiles (the motivation to have unified global coordinate system) and
can also display positions of detected artifacts (white dots).
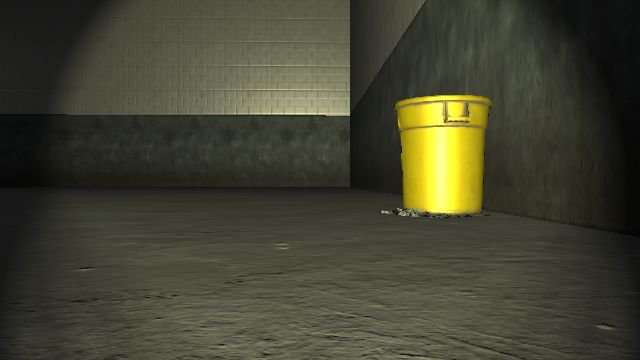
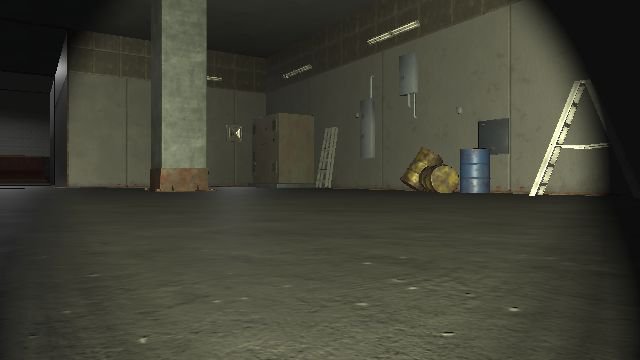
Below you can see some hard to handle obstacles with planar lidar only and
Vent which we have seen for the first time:


So what is the plan with RTAP-Map
(Real-Time Appearance-Based Mapping)? At the moment we are developing two
solutions in parallel, where one is based on
OSGAR only while the other should be
hybrid combining also ROS packages. The plan for the last few remaining days (5
to the final submission) is to use RTAB-Map to independently check robot
location and use it for recovery in the case of failure … and if I did not
stress it enough, the submission windows is opened now! … see
https://subtchallenge.world/compete
29th January 2020 — The Day Before Last Day
There is one day left to the end of submission window and it is quite crazy
again. Exhausted, sleepy, tired …
There are few bright moments like when ver51p1b scored 5 points, but there
are many dark times like that CloudSim does not work at all and robot is
not receiving data (b is actually repeated run, where the first totally
failed — robot hit the wall(no lidar data) or did not start (no data) or
was not able leave start area (no IMU data). Really crazy. See issue
#261.

And this is how the score board looked this morning:

… but it is different now and all 8 competitors are uploading their latest
solutions for test.
31st January 2020 — Robotika final submission
It is 5 hours to AoE deadline and Robotika final solution is submitted now.
Thanks God! It was as bad as last time and much worse … but we are getting
used to it, so DO NOT PANIC!
As final report I would say that we did not learn. Since Virtual Tunnel
Circuit we know, that closer to the submission deadline are, the harder it is
to test on AWS anything. And the same happened again. On the other hand the
development peak was definitely this last week, so what is the solution to this
riddle?! It started with
CloudSim
stops sending some topics (again) — shortly some robots did not get any
LIDAR scan data for example, or IMU. They did not start, or hit the wall
shortly after the start because they had no idea, there is a wall in front of
them. At that point it no longer had sense to trust AWS CloudSim.
But that was not the end. As the machines were more and more overloaded
Sophisticated Engineering reported
Problems
with Cloudsim. The simulations did not start, or failed (Terminated with
errors) or took hours (days?) and then failed.
Can this be worse? Yes, it can. The Unknown Error caused that competitors
were no longer able to submit anything. Not just testing solution but also
finals. This was the state since midnight till at least 2am, when I went to bed
to re-try now, in the morning. The deadline is AoE (Anywhere on Earth) so till
12 hours the day after in Central European Time. Nate wrote me: The server
was down for a brief period of time. Sorry about that. Everything is back to
normal. Please try again whenever you are ready..
A now it worked:


And here are the data:
A60F2400L B90F2400R C120F1900L D150F850F1350R E180F500F1200L 200670743174.dkr.ecr.us-east-1.amazonaws.com/subt/robotika:ver56 ROBOTIKA_X2_SENSOR_CONFIG_1
There are five robotika robots with version Ver56. Robots A and B take the
risk and try to explore the whole world for 40 minutes. It is risky, because
there is only one hour for the competition, so they have to manage to return in
20 minutes if everything goes fine and they do not fall from elevator vertical
shaft, for example. Then robot C tries normal exploration and should be
able to return in time (again, if everything goes well). Robots D and E are
house keeping robots and after some shorter time they return home and check
if everything is OK. Yes and hopefully they report some artifacts too …
Ver56 what is it? First of all it is (again) version which was never
running on AWS. Just could not. Not even Ver55, which contains refactoring
with ROS interface! Yes, no kidding, 24 hours to final submission we changed
core C++ code used to communicate from OSGAR to ROS master. The motivation was
loosing sensor data when the system is overloaded, but would you do this in
normal production? Definitely NO!
What else? There are final tune-ups from Jirka not to fall from stairs while
still navigate narrow corridors and climb steep ramps. The wall distance
was set to 80cm at the end.
Finally there were major changes in artifact detection. Full RGBD (image and
depth) data were used and besides estimation of artifacts via colors they were
re-filtered by clip in distance plane (expected median distance +/- 20cm) and
majority of pixels should remain. The last strike was filtering by object
hight, mainly to filter out other red robots and not to report them as
Backpack.
Sigh, fingers crossed! Now there will be 3 weeks pause with no indication what
is going on, so do not ask.
p.s. Thanks Jirka, PavelJ and Zbyněk for extraordinary support!
27th February 2020 — Virtual SubT Urban final results



- SubTv - Urban Circuit Awards Ceremony & Technical Interchange Meeting - DARPA Subterranean Challenge
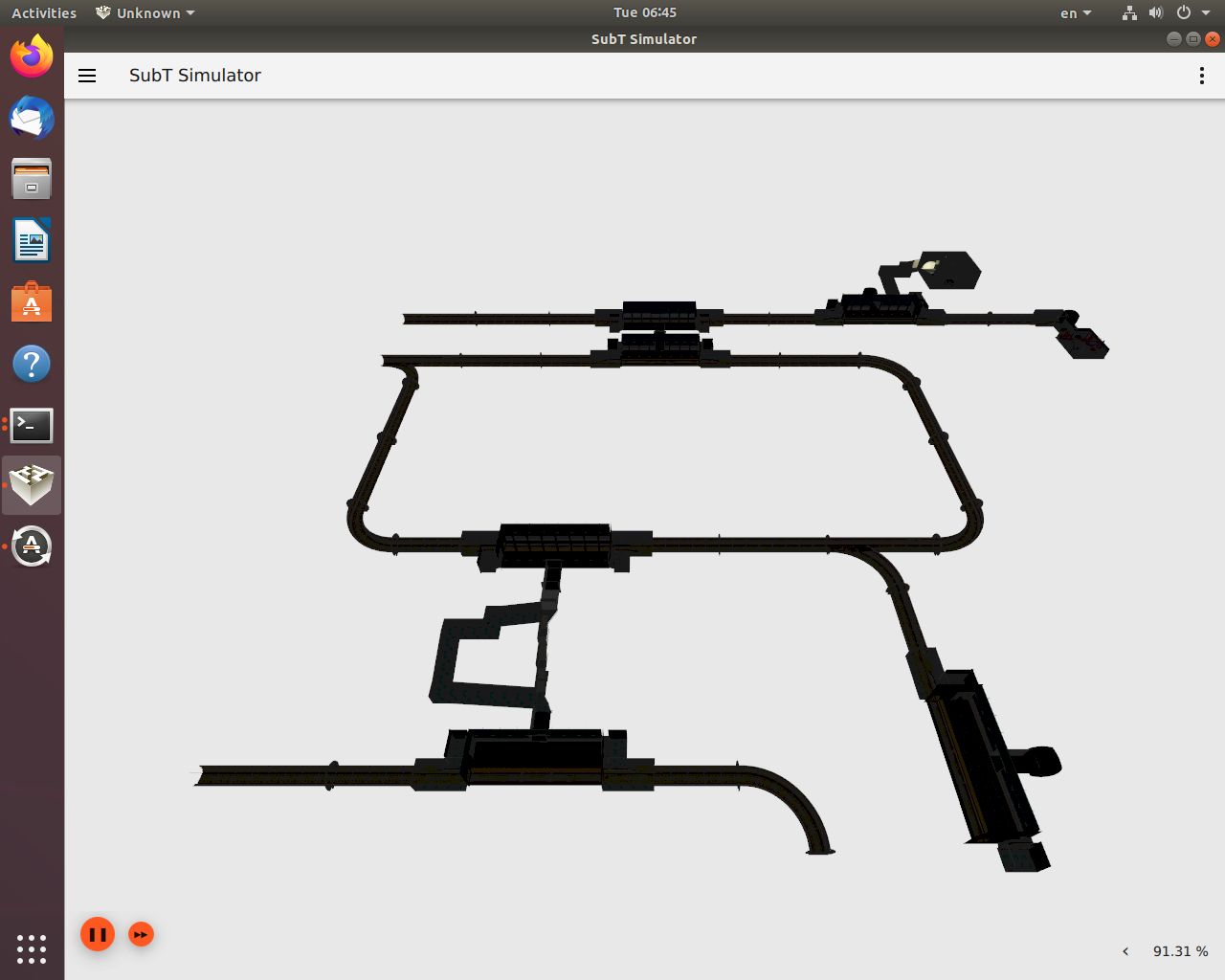
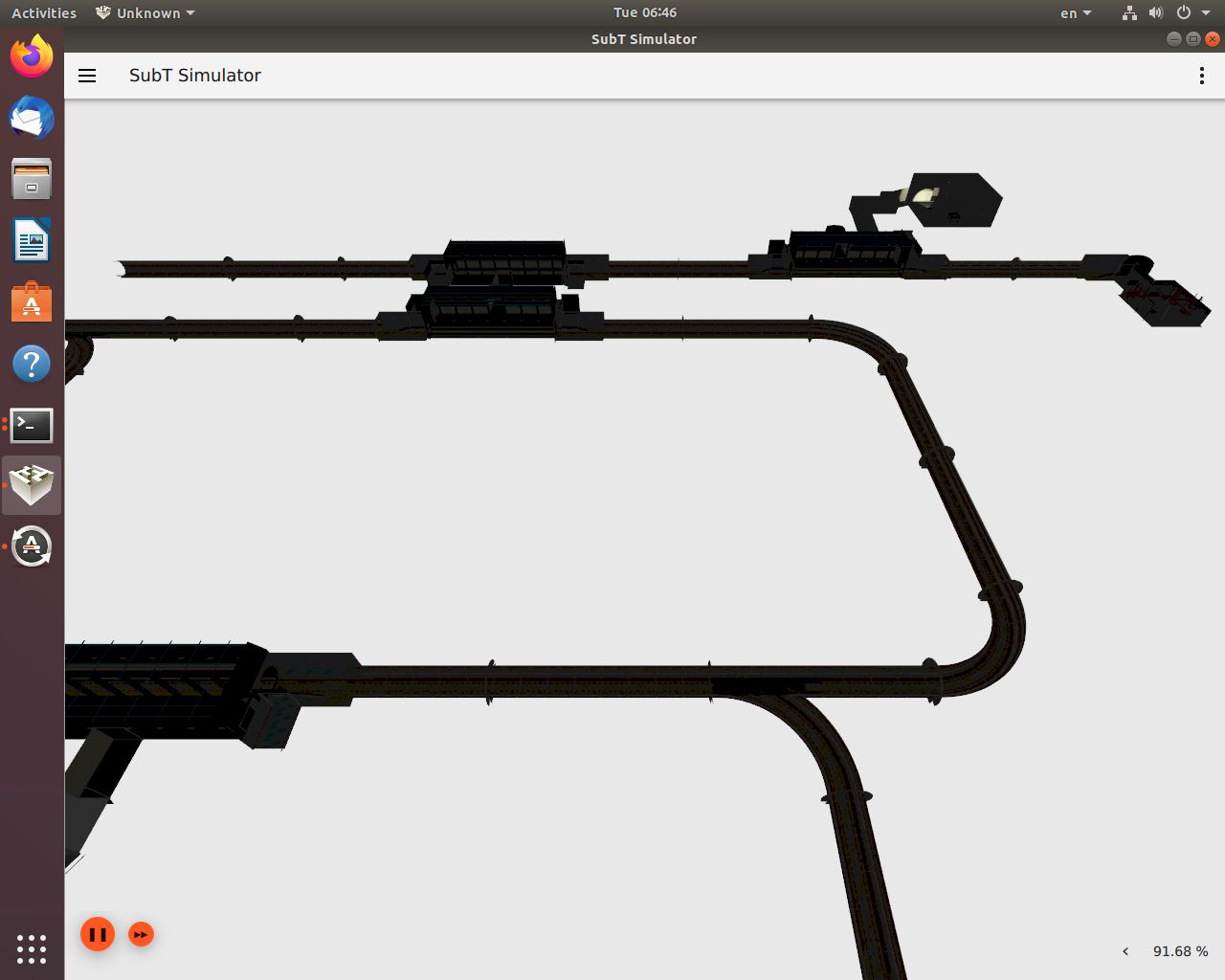
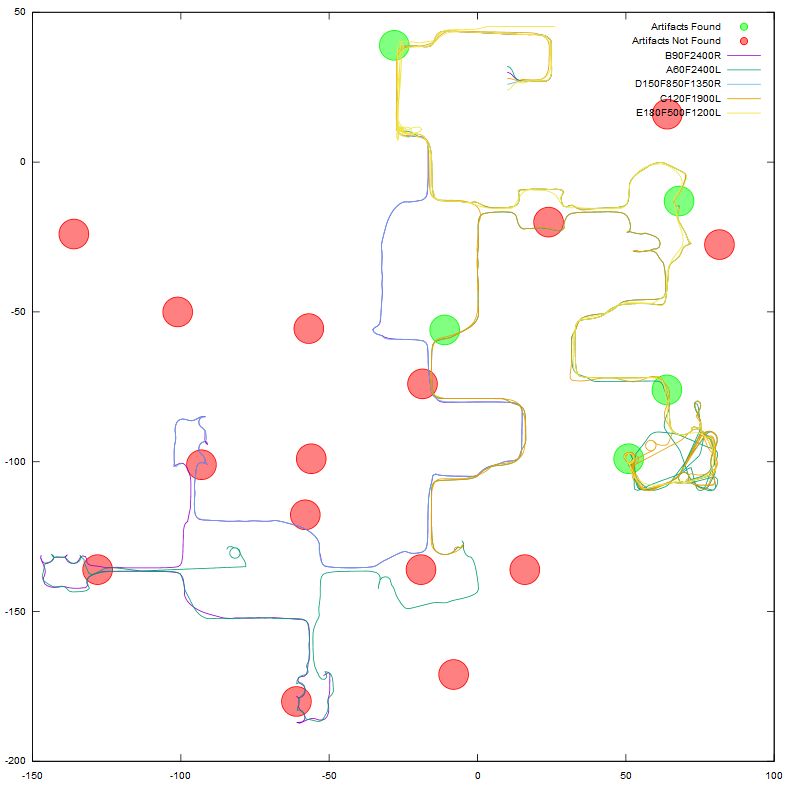
5th March 2020 — Virtual Urban Worlds
I do not have enough space left on my hard drive but with the new circuit there
is also a new feature robot_paths.svg! There is no long need to extract
paths of all robots — we get it for free + position of correctly reported and
not reported artifacts.
But that is approximately all for good news. When I looked at the first 4 runs
it looked nice:
|

|

|

|
… but then there were 20 failing (totally) runs:

|
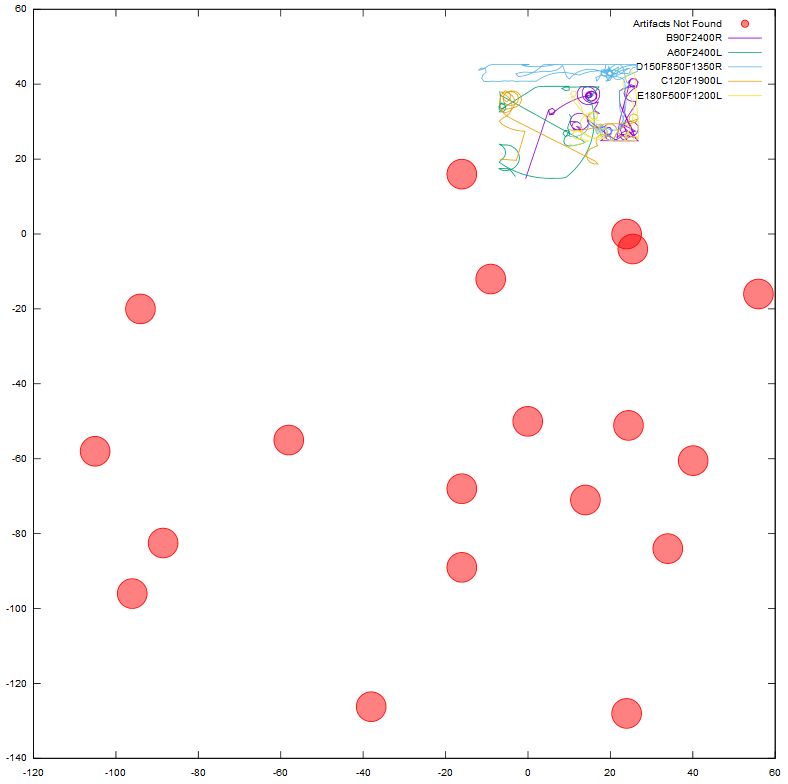
|
It is true that we were probably on the edge of resources … yeah, we should
and we are happy with the 3rd place we got!