Field Robot 2012
desátý ročník v růžích na Floriade
Soutěž Field Robot Event letos oslavila desáté výročí a to celkem grandiózně. Místem konání byla výstava Floriade ve Venlo/Holandsko, která se pořádá pouze jednou za deset let. Účastnilo se jí 18 týmů z celé Evropy a kukuřici nahradily růže, kterých bylo celkem 4000! Naše účast byla podobná té z roku 2010 — ve spolupráci s Českou zemědělskou univerzitou Eduro Team vyhrál nejtěžší kategorii a druhý den i soutěž založenou na spolupráci s jiným týmem.

|
Field Robot 2012 - technologie — aneb co se na FRE vyzkoušelo?
Soutěž Field Robot Event letos byla celkem náročná, obzvláště Professional
Task, kde měl robot autonomně lokalizovat vybranou růži, nabrat ji (podle
zalití měl květináč s růží až 4kg) a dovézt ji zpět na start. Na přípravu jsme měli přesně
měsíc, ale i tak jsme vyzkoušeli některé nové věci, o které se s vámi chceme
podělit …
|
Na Field Robot Event 2012 jsme vyrazili potřetí,
tentokrát znovu do Holandska. Pamatuji
si, že Venlo/Floriade byla v plánech už v roce 2009
a že už tehdy mne to zaujalo.
Krátce před soutěží to ale tak jednoznačné nebylo: robotici byli buď vysílení
dalšími soutěžemi nebo měli naplánované dovolené. Navíc Milan byl tou dobou
na půl roku na univerzitě v UK a já se ženou jsme na Floriade vyrazili raději už
na jaře na cibuloviny (Floriade se koná od dubna do října 2012).
Po mnoha záporných odpovědích to rozlousknul Standa, který psal, že by
rozhodně rád jel. Toto vše se dělo v předvečer uzávěrky registrací, tedy 30.
května 2012. Jak kývnul i Milan, že přijede z druhé strany z Británie, tak už kostky
byly vrženy a bylo třeba dořešit jen pár detailů jako třeba nějaký nabírací
mechanismus na růže, způsob jak rozpoznat/označit tu pravou …
Eduro Team FRE2012
Eduro Team, pod záštitou České zemědělské univerzity v
Praze, katedry zemědělských strojů, letos vypadal takto:
- Milan Kroulík — šéf
- Stanislav Petrásek — servis, podpora
- Jan Roubíček — mechanika
- Tomáš Roubíček — elektronika
- Martin Dlouhý — software
- Jana Dlouhá — zahradnice
Pravidla
Soutěžilo se v pěti kategoriích:
Basic Task
První úlohou bylo systematicky projíždět řádky ohraničené růžemi v květináčích
s tím, že robot musí být plně autonomní a na konci řádky se má správně otočit.
Bodovala se ujetá vzdálenost v metrech (1 metr = 1 bod) v časovém limitu 3
minuty. Za dotek operátora byly 3 trestné body v řádce a 5 trestných bodů za
pomoc při otáčení. Za povalený květináč byly 2 trestné body.
Na rozdíl od předešlých ročníků bylo nutné implementovat způsob, zda bude robot
dělat první otáčku vlevo nebo vpravo. První řádky byly letos rovné a další
úmyslně do mírné vlnovky. Důraz byl kladen na preciznost a rychlost.
Advanced Task
Pro druhou úlohu tým dostal kód trasy, pro letošek to bylo
3L-2L-5R-0-2L-4R, a robot měl po průjezdu řádky sledovat
tento vzor, tj. nejprve zahnout do třetího vlevo, pak do druhého vlevo, pak pátého vpravo …
Penalizace v této úloze byla letos stejná jako u Basic Task.
Asi největší zrada byly blokované řádky, které robot musel rozpoznat, vycouvat
nebo se v řádce otočit a pokračovat podle zadaného vzoru.
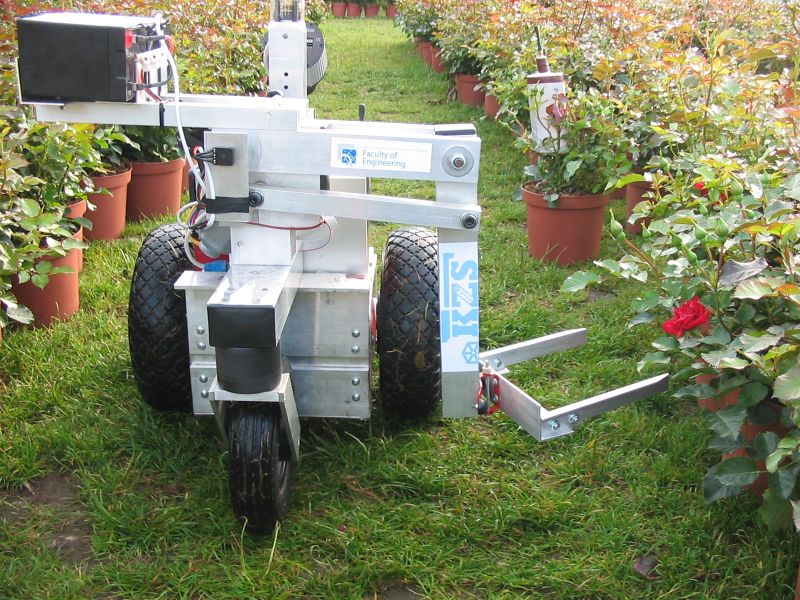
Professional Task
Toto byla nejtěžší úloha výrazně odlišná od předešlých ročníků: robot měl ve 3
minutovém časovém limitu autonomně najít označenou růži, naložit ji (2minuty
limit) a přivézt zpět na startovní pozici (2minuty limit).
Pozdější FAQ upřesňovaly, že vybraná růže bude v prvních třech řadách, takže
nebude nutné projít všech 4000 růží.
Freestyle
Volná jízda, kde roboti měli předvést cokoliv společného s tématikou růží.
Bodování bylo zcela v rukou komise.
Cooperation
Zde bylo cílem ukázat spolupráci dvou týmů a jejich robotů. Jednalo se o
doplňkovou soutěž konanou následující den. Jednotlivé páry byly náhodně vybrány
(resp. typický se kombinoval větší tým s menším) a na přípravu přesvědčivé
prezentace byly jen 2 hodiny.
Průběh soutěže
Soutěž byla třídenní: testování ve čtvrtek, Task 1 až 4 v pátek a Cooperation v
sobotu. Jak se později ukázalo, některé týmy dorazily už ve středu, kdy se
hřiště a zázemí teprve budovalo.
Na rozdíl od předešlých ročníků bylo testovací hřiště zároveň hřištěm
soutěžním. Navíc z důvodu velkého množství týmů se organizátoři rozhodli pro
paralelní jízdu vždy tří týmů. To bylo jednak atraktivnější pro diváky a navíc
soutěž rychle ubíhala.
Basic Task
První úlohu jelo Eduro pěkně, přesně podle očekávání. Na konci řádku si píplo,
zastavilo, udělalo 180 stupňů oblouk a tak stále dokolečka. Byl jsem tázán,
proč nejdu za robotem … protože bych mu jedině překážel a mohl něco pokazit
. Celkově Eduro ujelo 64 metrů bez doteku.

Advanced Task
Druhá úloha byla naše, ale možná i všeobecně, Achilova pata. Navíc už za druhou
otočkou byla past, kterou by Eduro rozhodně nezvládlo: pravá i levá řádka
květináčů skončila o metr dříve, takže by Eduro na 90% narazilo do řádky o
jednu dál. Po chvilkovém vnitřním boji jsem do kódu připsal hack, za který se
ještě teď stydím — pokud je předešlý manévr ob 3 řadky, přejeď řádku o 1m …
well, fuj. Ani mne neuklidňuje, že k této druhé zatáčce se Eduro vůbec
nedostalo.
Na rozdíl od první úlohy, průběh druhé byla dost fraška. Startovali jsme mezi
prvními, tak jsme si ještě plně neuvědomili, jak tu frašku hrát … prostě
robot jel rovně a pak ho soutěžící dali do další řádky. Takové posilování s
robotem.
Touto dobou pršelo, takže jsme jeli s deštníkem. Úmyslně jsem dal robota trošku
šikmo, aby kompenzoval odchylku způsobenou otevřeným deštníkem, a to byla chyba.
Na konci první řádky se robot otočil do mnou zvoleného šikmého směru a po
otočení pokračoval pryč od růží. Dobře mi tak :-(. Zkusil jsem otočku ještě
jednou, tentokráte rovně, ale ob 3 řádky mu vyšlo do růží, které hned
identifikoval jako překážku (blokovanou řádku) a zase nic. Pak už jsem robota
dal do řádky a ignoroval fakt, že sekvenci, kterou má vykonávat je uplně
nesmyslná. Prostě tragédie.

Professional Task
Náladu mi zvedla až poslední úloha, která se počítala do celkového hodnocení.
Těsně před startem přestalo pršet a tak jsme se rozhodli deštník odstřihnout.
Jednak šlo o vliv na zmíněný kompas a dále aby bylo lépe vidět na nabírací
mechanismus. Všichni roboti museli být na startu, protože pozice „náhodně
vybrané růže” měla být stejná pro všechny roboty. Byla v třetí řadě po pravé
straně, zhruba v půlce řádku.
Při testování se nám občas stávalo, že robot sebral sousední růži — prostě do
husté řádky květináčů vidle zajely o jednu vedle. Ptali jsme se na to na
schůzce rozhodčích, protože nám přišlo, že je to podle pravidel vlastně OK.
Našel by růži (s chybou 20cm), nabral by růži (pravda jinou) a odvezl na start.
Pro soutěž tedy bylo rozhodnuto, že sousední dva květináče budou odstraněny.
Možná nám chtěli pomoci, ale naše sekvence už byla naslepo, takže jediné co by
z toho mohlo být, je že by nenabral nic.
Nuže, štěstěna a Milanovi andělé (zrovna šel nějaký hrozný SPAM mailama) stáli
při nás. Eduro krásně zastavilo a vidlemi podebralo vybraný květináč.
Jelo však o trošku blíž ke květináčům (předpokládám, že to bylo dírou okolo) a při zvedaní do
květináče mírně tlačilo. Ten byl ale zaseknutý o květináče v druhé řade. Možná
byl dokonce vybraný květináč hranou pod druhou řadou, to si ale bohužel
nevybavuji. Dostali jsme povolení tyto překrývající květináče o 1cm posunout a
pak už ruka zvedala pouze jeden a ne tři a hladce růži nabrala.

Dovezení růže zpět na start už trošku vypadalo jak show pro diváky. Eduro si
dalo třetí řádku s označenou růží ještě jednou a místo přímé jízdy na start
projelo znova druhou a první řádku. Skončilo čelem k růžím pár centimetrů od
startovní pozice (kolik přesně netuším, ale jelikož se to počítalo na půlmetry,
tak jsme byli přesně na startovní pozici). Potlesk, gratulace, supr .
Jak se později ukázalo, Eduro bylo jediné, které všechny tři úlohy (najít růži,
nabrat růži a dovézt jí zpět) dokázalo zvládnout. Professional Task jsme tedy
vyhráli!
Freestyle Task

Na přípravu volné jízdy bylo hrozně málo času. Plán byl sundat ruku a nahradit ji
postřikovačem z roku 2010, se kterým se nám podařilo vyhrát Professional Task v
postřikování plevele v kukuřici v Německém Braunschweigu. Po úspěchu s
nabráním růže jsem se ale bránil změně konfigurace robota a tak Milan se
Standou nakonec postřikovač přidělali za ruku a nastavili nosný rám pomocí dvou
L-profilů. Nazval bych to hack-of-a-day, protože pak neseděly kabely na 12V
baterku (byly třeba nastavit). Také interface před dvěma lety byl jiný: starý
modul spínal nízkým napájením, nový už rovnou spínal malá relátka oproti zemi
(před rokem se to používalo na řízení motoru u ruky). Nakonec Standa obětoval
baterku z foťáku, kontakty přelepil páskou, do toho trošku čokolády. No
neuvěřitelné, co ti dva dokázali za pár minut.
Nebýt mé fóbie cokoliv dělat s robotem, dokud se neodjedou první tři úlohy, tak
vše mohlo vypadat jinak a proběhnout ve větším klidu, ale … nakonec
postřikovač blikal a houkal, ale nepostřikoval :-(. Po pozdější analýze Milan
došel k závěru, že motory se točily opačným směrem a tak to vodu nečerpalo.
Škoda.
Cooperation Task
V sobotu nás čekala ještě úloha s druhým týmem/robotem. Před odjezdem nám byl
vylosován tým Robatic z Wageningen University v Holandsku, kapitán Krijn
Schetters, www.robatic.nl. Oba týmy měly v pátek
úplně jiné starosti, takže co dělat jsme řešili až v sobotu dopoledne.

Musím přiznat, že tuto úlohu jsem si snad užil ještě více jak Professional
Task. Ve dvou hodinách jsme se pokusili zkombinovat vše co naši roboti
dokázali. Tak nadšené studenty jsem už dlouho neměl. Takže jaký byl stav: Eduro
umělo FollowMe, tedy následovat nejbližší objekt (vyzkoušel jsem to brzy po
ránu, kdy jsem s ním šel na krátkou procházku po Floriade). Bullseye (druhý
robot) měl poničenou elektroniku, ale byl schopen jízdy na dálkové ovládání.
Verze 0 — Bullseye jede a Eduro ho následuje. Fungovalo, vypadalo to pěkně a
všichni jsme se trošku uklidnili, že něco máme.
Verze 1 — bylo by pěkné, kdyby roboti spíše jeli vedle sebe, jako na poli.
Zkusili jsme tedy jízdu Edura v řádku, kterou simuloval druhý robot. Dokud jel,
tak Eduro vidělo překážku po pravé straně („řádku růží”) a když zastavil, tak
se otočilo na místě a jelo zase podél robota na druhou stranu.
Toto jakžtakž fungovalo, ale moc efektní to nebylo. Robatic navrhl, že se
pokusí rozchodit nabírací mechanismus na dálkové ovládání a že by si Eduro
mohlo vzít co Bullseye položí.
Po půl hodině se jim to opravdu podařilo, ale automatické objíždění druhého
robota moc nefungovalo (Eduro bylo zvyklé na řádku vlevo a vpravo, která jí
trošku srovnala). Další nápad — když Bullseye položí (!) květináč, tak se
Eduro chytne květináče a robot může klidně odjet. Test, fungovalo a vypadalo to
i vtipně .
Stačilo už jenom vymyslet příběh a divadelní scénku si 3x natrénovat. Nechť
Eduro je security robot, který má hlídat velmi vzácnou růži. Tu mu dá šéf
Bullseye, když ráno přijde do práce (přijel naložený řádkou růží). Eduro
následuje šéfa a pak na volném místě růži hlídá. Po nějakém čase se objeví
zloděj (shodou okolností zase Bullseye) a chce růži sebrat. Toho si Eduro
všimne a rozhodne se zloděje pronásledovat. End of Story.
(video z pohledu Edura)

Po tréninku fungovalo dokonale a porota nás označila jako jednoznačného vítěze!
Domů tedy povezeme dvě zlaté medaile a to už jde .
Závěr
 Výsledky |
Celkově jsme byli na 4. místě (počítá se pořadí z prvních tří úloh), ale jak
moc těsné to bylo můžete nahlédnout na snímku výsledkové listiny. Za sebe jsem
rád, že se nám podařilo obhájit první místo v kategorii Professional Task, a
potěšit ženu, která si pořídila 25 růží přímo od majitele sponzorského
zahradnictví . I Eduro samotné se posunulo o další úroveň: umí teď přijímat
data po RFID, hladce pohybovat s rukou s náklady až do 4kg a sbírat data o
odrazivosti z laseru. O tom, že to nebylo vůbec jednoduché, jak to teď možná
vypadá, ale někdy jindy …
p.s. robot se nám už do auta na cestu domů nevešel
Odkazy

|

|
|

|

|

|

|

|

|