Robot Challenge 2013
fandorama reportáž
RobotChallenge letos slaví již desáté narozeniny! Celkově se soutěžilo v patnácti kategoriích pro autonomní roboty, včetně již druhého ročníku AirRace. Nově přibyla kategorie „Line Follower LEGO”. Přestože přední příčky obsazovali spíše Poláci i našim týmům se celkem dařilo. Stovky robotů z více jak třiceti zemí … rozhodně bylo nač se dívat …
Air Race
 AirRace aréna |
Kategorie by se vlastně mohla jmenovat „Parrot AR Drone AirRace”, protože
všechny čtyři létající stroje byly AR Drone od firmy Parrot (dva starší a dva
verze 2.0).
Robo Hobby
Soutěž již podruhé vyhrál polský tým Robo Hobby. Od ostatních se dobře
odlišoval, protože všech sedm (?) členů týmu nosilo bílé pláště. Na Robot
Challenge soutěžili v mnoha kategoriích a možná i proto nebyli příliš sdílní
… nebo jsem se málo snažil. Robot byl řízen z tabletu a pět navigačních terčů
pravděpodobně používali pro případ, kdy se centrální ztratí ze zorného pole.
Jejich AR Drone se držela po zemi pohybujícího robota. Nevím jestli už loni měl
speciálně nasvícenou prostřední značku, ale v každém případě dokázal bezchybně
odletět 13 kol během deseti soutěžních minut. Byla to trošku nuda, ale pravidla
to povolují, a za robustní řešení si vítězství zasluhují.

|

|
|
Sirin
Na druhém místě skončil ruský tým „Sirin”. Start byl klasický generálský
efekt. Trénovali a jejich AR Drone 2.0 létala pěkně. Pak přišel start, drona
vzlétla a stala se neovladatelnou. Ani emergency přistání nefungovalo.
De-ja-vu.
Na vině byla wifina ve windows — po celých 10minut se nepodařilo s dronou
spojit. Resetovala se jak drona, tak notebook, vyměňovaly se baterky … nic.
Dlouho už jsem neviděl tak neštastný výraz. [Mimochodem, tento problém jsem
možná měl i já při čtvrtečním testování v garážích, tj. nemůže za to ani python
ani pygame, jak jsem v blogu psal, ale jde to ještě hlouběji...]
Po dohodě rozhodčích Sirin dostal ještě jeden časový slot. Nebylo to úplně fér,
ale když dám na váhu druhé místo za jeden bod vs. robota, který používá jenom
navigační čáru a šťastný tým po „katarzi”, tak jsem rád, že jsem se nijak
nebránil . Sirin tedy získal 7 bodů (zhruba v půlce času se něco pokazilo,
ale už si nepamatuji, co to bylo).
Po soutěži jsme se trošku bavili a autor říkal, že vycházel z
CV drone, který běží pod windows a
umožňuje propojení AD Drone 2.0 s OpenCV. Hlavní problém
co řešili bylo cca 1s zpoždění videa. Používali pouze spodní kameru na analýzu
navigační čáry a definovali si postupné cíle. Robot tedy vždy kousek popoletěl,
stabilizoval se, zpracoval snímek, a zase letěl na další cíl. Nebylo tedy nutné
řešit náklon kamery. Pro verzi 0 se zpracováním obrazu asi ideální.

|

|

|
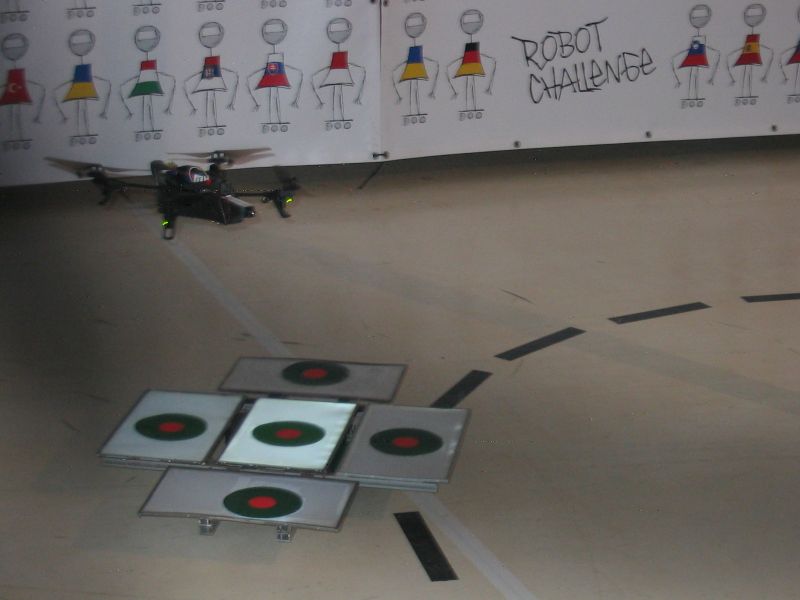
Heidi — robotika.cz
Moje Heidi s jedním bodem za úspěšný oblet nakonec skončila na třetím místě. Do
arény jsem si nalepil 9 navigačních značek (xerox černobílého kolečka s čárou,
co se dodává s dronou), ale jak jsem psal v blogu
detekce sice fungovala, ale automatické navádění se mi nepodařilo rozchodit.
Během sobotního dopoledne jsem ještě zkoušel vlastní navádění, ale v časovém
stresu bylo důležitější rozchodit verzi 0 v aréně.
 3.místo |
Při soutěži jsem pokus opakoval několikrát (podle logů 8x), kdy hned v prvním
kole Heidi osmičku obletěla, ale na startovní čáře se dotkla sloupu. Byl jsem
tedy ještě vděčný za poslední pokus, kdy osmičku obletěla čistě a do sítě se
chytla až v půlce druhého obletu.
Létal jsem pouze na odometrii, ale detekce tagů byla zapnutá, a z logů je vidět,
že místo pravidelné mřížky drona občas uletěla i dvojnásobek. Podlaha byla
celkem jednotvárná a výrazné vzory byly pouze navigační čára a mé značky.
Flying Dutchman
Na posledním místě skončil rakouský tým „Flying Dutchman”. Ten pro navigaci
používal pouze přední kameru, ve které se snažil najít zajímavé objekty. Podle
nich chtěl triangulovat a udržet si absolutní pozici. Tento přístup prý dobře
fungoval v uzavřeném prostoru s mnoha překážkami, ale na AirRace byl
nepoužitelný. „Létající Holanďan” uletěl cca 4m a vzdal to.
Jako kompenzaci by možná mohl brát vítězství v „Semi-autonomous AirRace”
kategorii — zůstal v ní sám a obletěl 27 kol (po nechtěném doteku sloupu,
v čase zhruba sedm minut po startu, již pokus neopakoval).

|

|

|
Závěr
Myslím si, že AirRace je idální kategorie pro všechny, kdo by se rádi pokusili
o autonomní létání (sám jsem toho příkladem). Bodové výsledky byly celkem
jednoznačné a je vidět posun od loňska, kdy pouze RoboHobby získal jediný
bod. Pokud bych měl na Robot Challenge vyrazit znovu v roce 2014, tak by cílem
bylo autonomně pokořit letošní rekord stroje ovládaného člověkem (27 kol).
Na to by snad kombinace s pozemním robotem již nestačila a při vyhlašování
bychom slyšeli českou hymnu. Kdyby do toho někdo chtěl jít se mnou, tak mi
dejte vědět …
Free Style
Kategorie „volná jízda” umožnuje představení nejrůznějších robotických
inovací. Na RC2013 dostal každý projekt
vyhrazený stánek u vchodu do budovy a jednotlivé ukázky byly hodnoceny
skupinou sudích (inovace, náročnost, prezentace, technická dokonalost, atd.).
Letos bylo k vidění 10 robotických projektů, které zmíním v pořadí jak jsem je
sám procházel…
LUDO Player
První zastávka byla u českého stánku s robotickou rukou, která s vámi hrála
Člověče nezlob se. Kdybyste nechtěli hrát vy, tak si vystačila i sama a hrála
sama se sebou. Hrálo se se dvěma figurkami dvou barev (červená a modrá), s tím,
že kostka byla digitální a procvičovala vaši znalost binárního kódu (asi
nejslabší místo jinak moc pěkné prezentace).
Co mne na tomto projektu hned na první pohled potěšilo bylo obrovské nadšení
středoškoláků … robotika nevymře s naší generací . Design a provedení bylo
velmi pěkné, provedené v laku … prostě bylo vidět, že kluci jsou silní v
mechanice. Pro detekci, kam člověk táhl s figurkou, byla použita stará
klávesnice (viz foto se spodním pohledem).


zerOne robotics
Druhá česká prezentace pocházela z Prahy s volnější vazbou na ČVUT FEL. K
vidění byl jejich modulární všesměrový tříkolový robot osázený dvěma USB Sick
laserovými skenery, kamerou a spoustou dalších senzorů. Vedle Free Style robot,
resp. jeho záložní dvojče, soutěžil i v kategorii Puck Collect.
Tým tvoří hlavně elektronici a jsou to převážně studenti FELu (s pár
výjimkami). V rámci ukázky robot předváděl vyhýbání se překážkám s možností
dálkového ovládání.



Thunderstorm Linefollower
Další stánek byl polský s upoutávkou na Robotics
Festival ROBOCOMP 2013, který se bude konat 11. května v Krakově (kategorie
jsou dost podobné jako na Robot Challenge). Andrzej předváděl svého šampióna
z jízdy po čáře, který se vedle vítězství v Polsku může pyšnit i originální
konstrukcí. Aby robot udržel potřebný kontakt s podlahou, používá přísavnou
turbínu. Ta je natolik silná, že robot může jezdit i po zdi!! Na druhou
stranu je těžké takového robota chytit a tak turbína byla zlomena, když někdo
nezkušený chtěl robota ze zdi sundat. Pro zajímavost alespoň
video na YouTube nebo
prezentace



Greta, Eyesbot a Decorator
Další blok stánků byl z Ruska — stejná skupina jako tým Sirin na AirRace.
Všichni tři roboti měli společný základ: Lego Mindstorm. Je až neuvěřitelné, co
se z lega dá postavit. Pravda, že Greta „the hands clamping robot”
potřebovala výztuže a serva, ale stejně (mimochodem Greta kategorii Free
Style vyhrála).
Tak co Greta přesně dělala? Byla oblečená jako malá holčička s kamerou na hlavě
a čekala až na ní zamáváte. Pozdravila vás a začala hrát tleskanou … od
základního vzorce až po složité a rychlé … a děti z ní byly úplně fascinované
.
Eyesbot byl původně ukázkový robot pro malé děti s poruchou vidění. Pro tréning
pohybu očí robot „předcvičoval”. Přestože místo očí má jenom infra senzory
(Sharpy), tak mimika při otáčení za překážkou vypadá velmi věrohodně.
Poslední z trojice, Decorator, byl zdobící robot. Maloval různé vzory fixou na
balonky a tedy i on byl u dětí oblíbený. A pokud nemáte vánoční ozdoby, tak
Decorator vám je nazdobí.






X-Walker
Chodící čtyřnožku předváděl na polském stánku
Wiktor Wysocki. Jednalo se o
24x24cm velkého robota, který pro pohyb používal 12 obyčejných modelářských serv.
Po pravdě nebyla uplně obyčejná, protože je autor upravil aby mohl měřit proud
jak moc je daný kloub zatížený.
Mozkem robota byl procesor s FPU, tedy s podporou pro rychlé výpočty s
desetinými čísly. IMU jednotka říkala náklon robota a ten se snažil ho okamžitě
kompenzovat. Ovládání z PC určovalo pouze kterým směrem a jak rychle se má
robot pohybovat. Za zmínku i stojí fakt, že robot chodil čtyři hodiny (!) bez
výměny baterek.
Jako každý robot i tento měl svůj problém a to v kabeláži. Malé drátky pro
měření proudu na servech se intenzivním používáním ničily a po skončení RC2013
je Wiktor asi bude muset všechny předělat.


Balbina
Balbina byl další polský robot imitující komunikaci s člověkem. Co mne až
fascinovalo, bylo jednoduché použití dvou 8x8 LED polí pro oči a jednoho 16x8
pro ústa. V kombinaci s hlasem a natáčením hlavy člověk měl pocit komunikace
s humanoidem. Pro zvýraznění „emocí” byla řídící jednotka průhledná a
obsahovala jednu vícebarevnou LEDku. Robot tedy červenal, když byl naštvaný a
žluto-zelenal když byl v klidu.
Za zmínku asi ještě stojí použití Kinectu a možnost hraní jednoduché hry, kdy
se oči změnily ve skóre a ústa na pingpongové hřiště .



Trobot
Polský stánek s šestikolovými robůtky — skoro ideální na Robotour (pravda,
pozapomněl jsem na 5l sud). Každé kolo mělo nezávislý závěs a pružinové tlumiče.
Na RC2013 autoři předváděli vyhýbání se překážkám s cílem dohonit míček dané
barvy … jako by se chystali na SICK
Robot Day 2012, až na to, že o něm nevěděli …


Sumo, Line Follower a Puck Collect
Když se konal v Praze první Český Eurobot,
tak jsem byl za mini-sumo ukázky vděčný — byl to vhodný doplněk a zábava i
pro nejmenší. Dnes se ale na sumo koukám spíše negativně, jako hraniční
disciplínu k „robot wars”. Nejen že nectí 3. Assimův zákon robotiky, ale
podle zprávy JPP agentury(*) o zkrvaveném ručníku bych tvrdil, že ani s 1.
zákonem si moc starostí nedělá. Prostě robotické sumo (hlavě to velké Mega
Sumo 20x20cm, 3kg) už nemám rád. Koukal jsem na finálové zápasy a trvaly pod
sekundu. Děsný masakr. Ne náhodou je u Mega Sumo povinný „kill switch”. V
kategorii Lego Sumo, kde je možné použít pouze díly ze stavebnice Lego, takového
zabijáka sice nevytvoříte, ale …
Za zmínku stojí drobná změna pravidel startování zápasu v kategoriích Mega, Mini
a Micro Sumo (je dost možné, že byla už loni). Před lety jsem zachytil stížnost
na robotické konferenci na
pandoře o nespravedlivém hodnocení v jednom ročníku
Istrobotu, kdy zlomek sekundy v této soutěži
hraje velkou roli a zároveň se to špatně soudcuje. Robot Challenge našel nové
řešení v povinném startovacím modulu, kdy sudí
zahájí zápas IR vysílačem.
Sledování čáry je už také klasika. Možná o něco zajímavější je Line Follower
Enhanced kategorie, kde vedle přerušené čáry a cihly byl letos houpací most
.
Nakonec ani „Puck Collect”, tedy sběr barevných puků, není třeba dlouze
představovat. Sám jsem si v této kategorii před lety
zahrál. Je to rozhodně dobrý začátek pro
testování indoor robota se zpracováním obrazu. Letos byly jiné puky: místo 15mm
(?) jsou teď 20mm a jsou vytištěné na 3D tiskárně.
Letos štěstěna přála i českému týmu MART
(zde
jsou finálové výsledky), tak snad se brzy objeví na YouTube nějaka videa, která
bych sem přidal. Jejich robota poznáte snadno: má na sobě model hradu Karlštejn
.



(*) Jedna Paní Povídala
[Edit]
- YouTube kanál RUR týmu (včetně videa z Puck Collect)
- videa od týmu MART: MART vs. Cheesoid, LegoWoodMetal vs. MART
Závěr
Jsem moc rád, že jsem letos na Robot Challenge vyrazil. Akce je velmi dobře
organizovaná a nákladná a tak mi registrační poplatek přijde zcela na místě.
Nepamatuji si přesně letošní statistiky, ale účastníků bylo k 500, robotů skoro
400 (Heidi měla číslo 391) a účastníci dorazili z 34 zemí. Robot Challenge si
zaslouží přívlastek „mezinárodní” a je to milé zpestření každoročně začátkem
jara (ačkoliv zrovna teď venku sněží). Vřele doporučuji.



P.S.
Mezi mnoha upoutávkami na další soutěže a katalogy firem se součástkami byl i
letáček na webový on-line editor tištěných spojů
circuits.io. Možná by se to někomu hodilo.
Odkazy:
- Stránky organizátorů: https://www.robotchallenge.org/
- Výsledky: http://www.robotchallenge.org/results/
- Článek na stánkách robotika.sk
Fandorama — poděkování
Toto je druhý pokusný fandorama projekt. Článek
vznikl díky podpoře následujících fandorama přispěvovatelů:
- Ondřej Luks
- Pavel Skoták — GarbageOut: Quantum Of Robotics
Pro mne to byl důležitý „kick”, abych si pořídil čtyřtulku
a pro čtenáře jako vedlejší efekt vznikl létající
fandorama blog k IARC.
- Detaily tohoto projektu: https://fandorama.cz/projekty/921778164/robotchallenge-2013/
p.s. také díky moc Kamilovi za průběžné korekce mé šílené češtiny