Integrace mechanického gyroskopu
z kuchyně dvojnásobného vítěze soutěže Robotem rovně
Psal se rok 2010 a nějakou náhodou jsem narazil na stránky kufr.cz, kde mě zaujala soutěž RORO. Spíše ze zvědavosti jsme narychlo upravili autíčko a se synem vyrazili omrknout, o čem to vlastně je. S velkým zaujetím jsem sledoval tu spoustu lidiček, snažících se dojet se svými udělátky co nejdál rovně. První, co nezasvěceného napadne je, že to nic není. Rovně přece umí jet kde co. Ale hned po prvním pokusu asi každý rychle zjistil, že opak je pravdou. Rovně prostě nejede nic …
A tak se zrodila myšlenka něco sestrojit.

Začal vznikat stoj určený pro tuto soutěž, ale stále nebylo jasné, jak a čím
bude řízen. Připadaly v úvahu kompas a snímače na kolech. Jako motory byly
použity podobné jako má LOKO pořadatelů soutěže, ale záhy po dokončení podvozku
se ukázalo, že jejich síla je příliš malá. Byly tedy vyměněny za podstatně
větší – 12V stěračové motory z vozu Š120. Ty se válí v kde jaké garáži a jak se
ukázalo, volba to byla dobrá. Pro výkonové řízení jsem použil modelářské
regulátory FUSION AQUAPOWER s max. proudem 90A. Malá, programovatelná a cenově
dostupná krabička je velice odolná a mohu jí vřele doporučit. Bezproblémová
regulace o nuly na obě strany ovládaná servo signálem.
Rám a pohon byl tedy vyřešen a odzkoušen pomocí vysílačky. Ale co dál. Po
přečtení článků na roborických stránkách jsem pomalu začal opouštět myšlenku
kompasu a odometrie. A náhoda mi přihrála kus tajemného železa, pocházejícího z
vojenské techniky. Tím byl gyrokompas pravděpodobně z tanku T72. Bohužel jsem
ho dostal s ustřiženým svazkem asi 30 drátů bez jakékoli elektroniky. Byla to
výzva.
Začal jsem tedy shánět literaturu a snažil se pochopit, jak toto monstrum
pracuje. Problém – teorií je na netu dost, ale nic konkrétního. Zjistil jsem,
že nejlepším zdrojem informací jsou diplomové práce. Zvláště jedna se zdála být
velmi přínosná, ale když jsem se prokousal ke konkrétním faktům, text na
stránkách byl nahrazen jen nápisem „ vzhledem k utajení, kterému text podléhá,
nemůže být zveřejněn“. A byl jsem zase v ……( na začátku ).
A začalo období pokus – omyl. To asi každý dobře znáte.

Úkol č. 1 bylo roztočit motor setrvačníku. Z toho mála, co se podařilo zjistit
je to třífázový 36V motor s kotvou na krátko zapojený do trojúhelníku (
vyvedeny jen 3 dráty ). Frekvence 400Hz, tedy cca 22 000ot/min. Byly zkoušeny
střídavé modelářské regulátory, ale bez úspěchu. Indukčnost vinutí je pro ně
patrně příliš vysoká a ony nemají patřičnou odezvu naindukovaného napětí. Ani
impedanční převodník v podobě třech transformátorů se neosvědčil. Použil jsem
tedy 3-fázový H můstek, tvořený 6-ti kusy L149, napájený 24V. Jako zdroj
impulsů procesor PICAXE 20M2. Ten kdo si zkusil roztočit krokový motor do
takových otáčet asi zjistil, že bez orig. elektroniky se mu moc nechce.

No, nechtělo se mu. Několikrát jsem to vzdal a zase začal znovu. Nakonec
vzniknul program, který postupně pomalu zvyšuje frekvenci Doba náběhu do otáček
je potřeba min. 10min. a pak ještě dalších 10min. na jejich stabilizaci. S
napájením 24V se dalo ale dosáhnout max 15000 ot/min. Pak už ztratil motor
sílu. Stačilo s ním zatřást, magnetické pole se „utrhlo“ a bez ohledu na
napájení začaly otáčky klesat až se zhruba po 15min. setrvačností dotočil. Aby
se dosáhlo vyšších otáček , bylo by potřeba zvýšit napětí. Další baterii jsem
už ale odmítl. I tak to byl úspěch a vypadalo to celkem postačující.
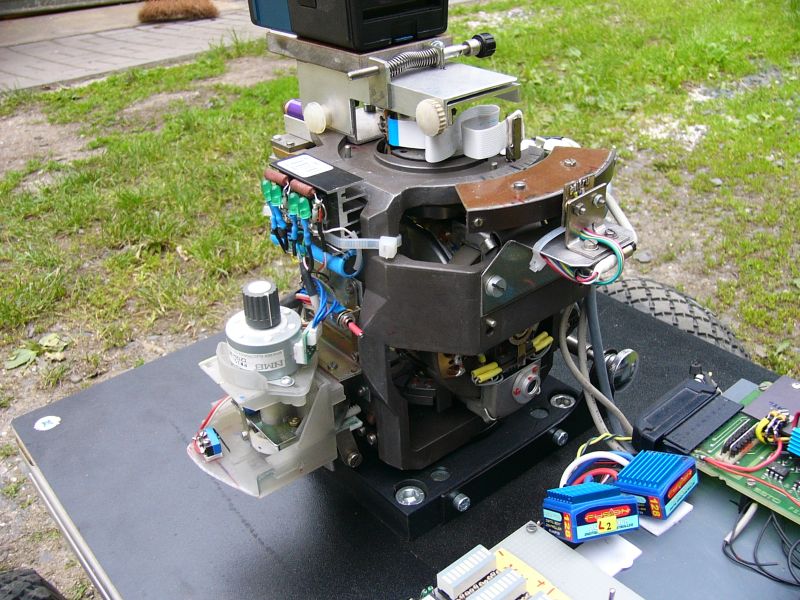
Gyroskop se sice točil, ale dělal si co chtěl. Celý systém má tři stupně
volnosti a ve dvou osách celkem čtyři elektromagnety s pohyblivým jádrem. Dva
udržují setrvačník ve svislé poloze při bočním náklony. Druhé dva vytváří sílu
působící potřebnou proti rotaci země. Roztočený setrvačník si musíme přestavit
jako těleso, které stojí a okolo něj se otáčí zeměkoule. A ta se pohybuje
rychlostí 15°. za hodinu. Přesně o tento úhel se pootáčí i gyroskop. Úkolem
těchto elektromagnetů je tedy na něj působit takovou silou, aby zůstal stát na
místě. Ale máme tu elektromagnety, které mají při stejném proudu jinou sílu
když je jádro na kraji a jinou pokud je více zasunuto. Nevím jak to vyřešili
tvůrci systému, já se dal dlouhou cestu vytváření datového pole, kde určité
výchylce je přidělen patřičný proud, respektive PWM signál. Není to sice
nejlepší, ale je to postačující. Vzhledem k tomu, že během jízdy jsou výchylky
někde na max. desetinách až jednotkách stupních, bylo možná zbytečné tomu
věnovat tolik času.
O trochu snadnější byla stabilizace bočního náklonu. Tam se dalo použít
kontaktů asi k tomu předurčených a doplnit pár tranzistorů a odporů. Pokud se
gyroskop nakloní, elektromagnety pomalu vrátí setrvačník zpátky do svislé
polohy. Funguje to ale pouze při náklonu pár stupňů.
Tak gyroskop se točí a celkem i stojí na místě. Teď tedy vyhodnotit měření
směru a velikosti pohybu. Mechanické snímání nepřipadá v úvahu. Jakékoli
sebemenší tření ho totálně rozhodí. Nakonec padla volba na snímač magnetické
pásky AS5304 s rozlišením 0.025mm.
Výstup je jako z inkrementálního snímače. Konečné rozlišení úhlu je asi někde
na setinách stupně. Přesně jsem to nepočítal. Každý gram navíc přidaný na
pohyblivou část gyra je potřeba samozřejmě vykompenzovat.
Celá tahle sranda mi zabrala zhruba 5 měsíců skoro každodenní práce.

Zbývalo už „jen“ převést výchylku gyroskopu na rychlost motorů a vyřešit
zaměření osy závodní dráhy. Jako nejlepší se ukázalo laserové ukazovátko. Ta
zaměřovací lať s odrazovkama při startu je nutná, protože tak slabý laser jinak
není ve dne vidět. Červený laser na červené odrazovce ale ano. A začal nespočet
zkušebních jízd na perfektně rovném a hladkém povrchu. Bylo nutné sladit laser
s gyroskopem alespoň na desetiny stupně. Když totiž vezmeme v úvahu, že závodní
dráha je dlouhá 314m, široká cca 3m, tak při zaměření na odrazovku ve
vzdálenosti nějakých 20 – 30 m daleko máme povolenou chybu někde v jednotkách
několika málo centimetrů. A to ještě nepočítám chybu celého systému na nerovném
povrchu.
Pro náš první závod byla osa zaměřena pomocí laserového ukazovátka. Nic moc.
Laser z tržnice od Vietnamců udělá totiž na 300m celkem pěkně velké kolečko. I
tak se to v deštivé noci pře závodem celkem povedlo. Označili jsme si osu dráhy
a nechali to osudu. Osud nám přál. Dojeli jsme třikrát až do konce. I když ve
třetím kole to bylo s odřenýma ušima. Coby nováčci v této soutěži jsme
vyhráli.
Pro robota byl narychlo zvolen název GŘAS aneb Gyroskopem Řízený Autonomní
Samochod. Dobrá plácanina, ne.
Snad se mi tímto úvodem do problematiky mechanického gyroskopu podařilo
odpovědět na většinu otázek a nastínit, o čem to vlastně všechno je. Pokud se
do toho někdo někdy pustíte, přeji opravdu pevné nervy. Ale jde to. Možná
přijdete na mnohem jednodušší systém, jak ho potvoru zkrotit. Rád se s vámi
podělím o mé poznatky. Je to opravdu zajímavé.
O tom jakými úpravami prošel tehdy ještě GŘAS před dalším ročníkem závodu RORO
zase příště.

|

|
|