Hexapod
návod na stavbu chodícího robota
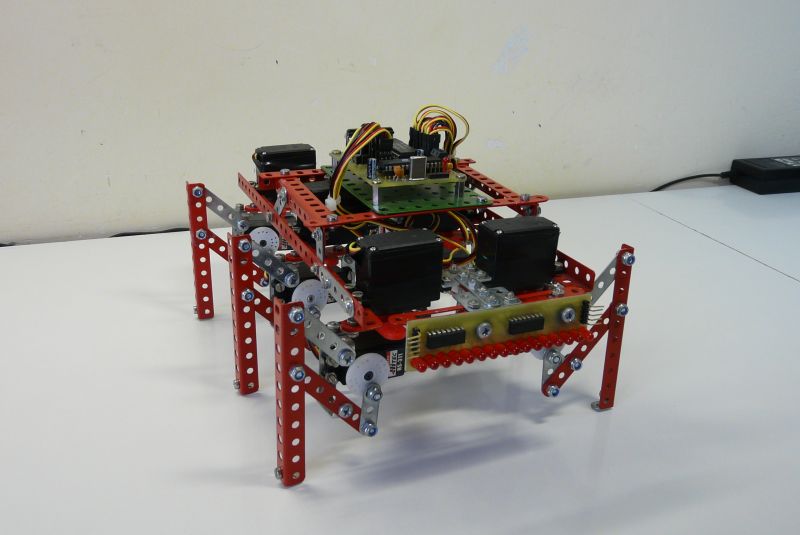
V létě 2007 jsem byl požádán Stanicí mladých techniků (SMT) v Plzni o postavení jednoduchého robota z Merkuru. Měl představovat materiální vyobrazení trendů, kterými se chce stanice v budoucnu vydat. Souhlasil jsem a rozhodl jsem se tedy postavit malou „šestinožku“. Díky kvalitní spolupráci s vedením, jsem měl potřebné díly včas připravené a mohl se pustit do stavby… Tento článek obsahuje kompletní a podrobný popis stavby mechaniky šestinohého robota.
|
Už od počátku bylo podmínkou, aby robot byl z Merkuru – důvod je jasný, Merkur
je geniální stavebnice, kterou má hodně lidí stále doma. Pohon robota (akční
členy, aktuátory) tvoří 12 modelářských serv Hitec HS-311. Ta jsou jedním
jeden z nejlevnějších „všeúčelových“ servopohonů na trhu. Řídící obvod je
schopný ovládat všechna serva najednou, dle příkazů přicházejících po běžné
sériové lince PC.
Potřebný materiál a vybavení
Pro stavbu jsem používal stavenici Merkur M8 – největší a pravděpodobně i
nejlepší, která se prodává již mnoho let. Každá ze šesti nohou má dva
stupně volnosti (směry pohybu), aby bylo možno dosáhnout stabilní chůze.
Na rozpohybování robota tedy potřebujeme celkem dvanáct serv.
Dále budeme potřebovat 30 šroubů M4x12 s válcovou hlavou a se samojistnými
matkami - mají po vnitřním obvodu plastový kroužek zamezující povolení (princip
podobný kontramatkám, které je také možné použít). Šrouby i matky je možné
koupit v každém větším železářství.
Stavba těla robota
Při konstrukci s podobným účelem je vždy nutné držet se maximální
jednoduchosti. Pro jakékoliv zbytečně rozsáhlé či masivní konstrukce zde prostě
není místo. Robot je navržen s ohledem na co největší jednoduchost, bez omezení
pohybových možností.
Stavba:
1. Úprava nástavců osiček
Vemte šest křížových nástavců dodaných se servy. Vyvrtejte do nich dvě díry
stejně vzdálené od středu tak, aby rozteč mezi nimi odpovídala rozteči mezi
čtyřmi dírami v rastru Merkuru (30mm). Průměr děr by měl být 4mm.
Každý nástavec poté přišroubujte na osičku jednoho serva tak, aby, pokud je
servo zhruba uprostřed dráhy, byly námi vyvrtané otvory v podélné ose serva.

|
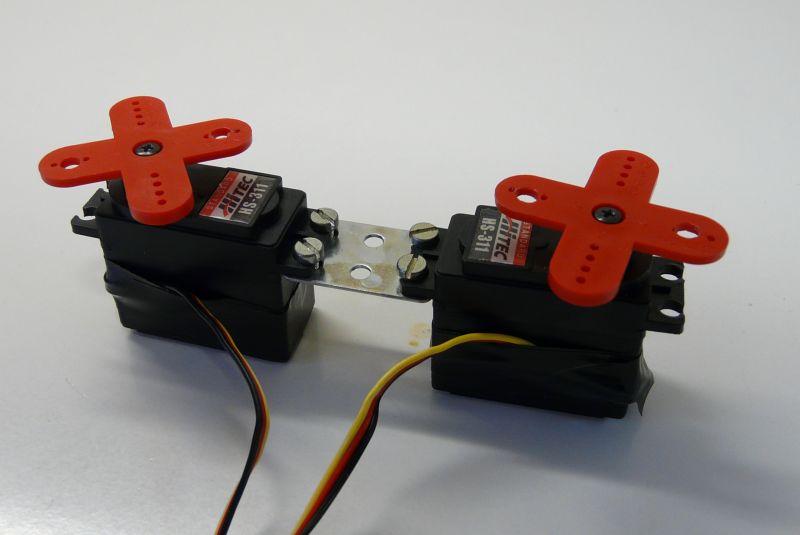
2. Vyrobení tří párů serv
Připevněte běžnými šroubky dvě serva k sobě pomocí destičky s 3×2 dírami. Serva
musí být osičkami od sebe (jako na obrázku). Při šroubování doporučuji být
opatrný, montážní otvory serv nemají rozteč shodnou s Merkurem, půjde to
ztuha.
Tímto postupem vytvořte tři stejné díly. V dalších krocích je namontujeme na
společnou kostru těla.
|
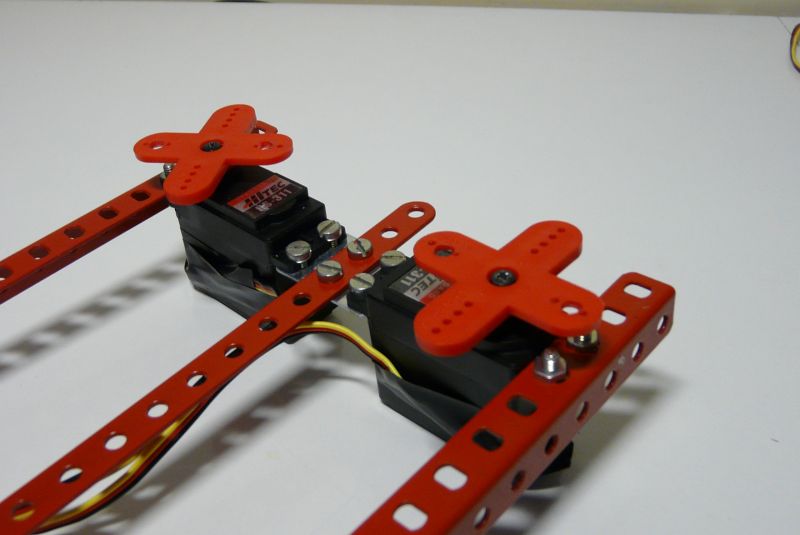
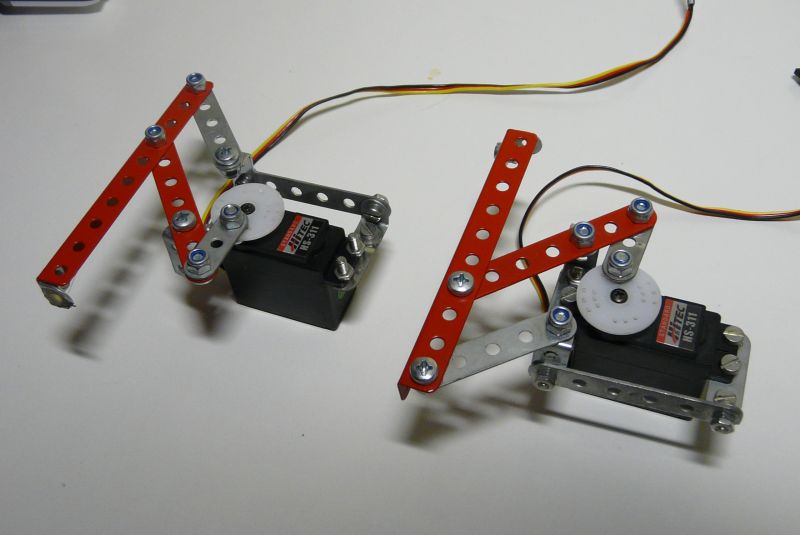
3. Přepevnění prvního páru servomotorů na tělo
Vezměte dva „L“ profily a jeden pásek, všechny s 25 díráami. Připevněte je
k jednomu páru serv dvě díry od kraje (dle obrázku).
|
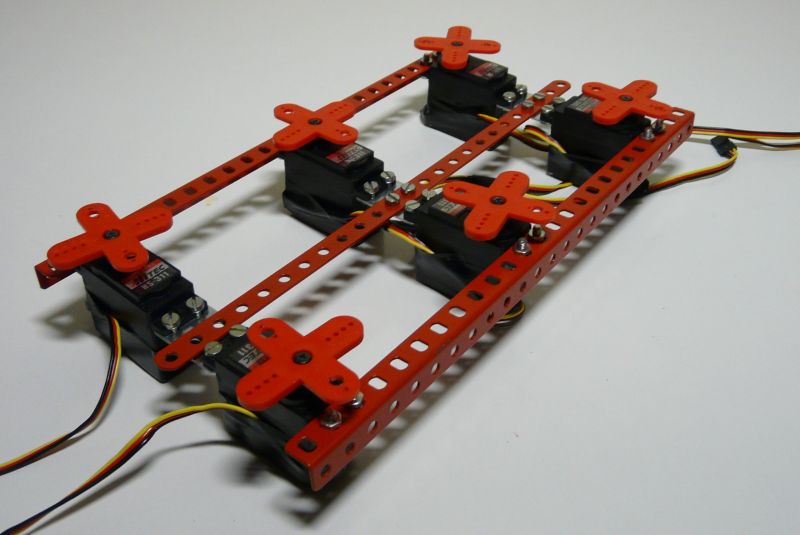
4. Připevnění dvou zbylých párů motorů
Analogicky jako v předchozím kroku připevněte další dva páry serv. Druhý
(prostřední) pár musí být 8 děr od prvního a poslední pár musí být jednu
díru od konce „L“ profilů a pásku. Vše by mělo být zřejmé z fotografie:
|
Tím bychom měli hotové tělo robota, na jednotlivá serva budeme postupně
přidávat nohy.
Stavba nohou
Toto fáze stavby už je poněkud složitější – je nutné postavit šest nohou. Existují dva
různé druhy, které jsou navzájem zrcadlově otočené, tj. levá a pravá noha.
Rozdíl mezi levou a pravou nohou je nejlépe poznat z obrázku:
|
1. Úprava nástavců serv
Vezměte šest kulatých nástavců a vyvrtejte do nich díru o
průměru 4mm kdekoliv po obvodu.
Čím dále od středu díra bude, tím lepší zdvihové vlastnosti získáme, dbejte na
to, aby byla vzdálenost děr od středu u všech nohou stejná.

|
Následující kroky obsahují popis, jak sestavit jednu nohu. Rozdíl mezi levou
a pravou nohou je jen ve druhém kroku. Ostatní kroky jsou stejné nebo velmi
podobné.
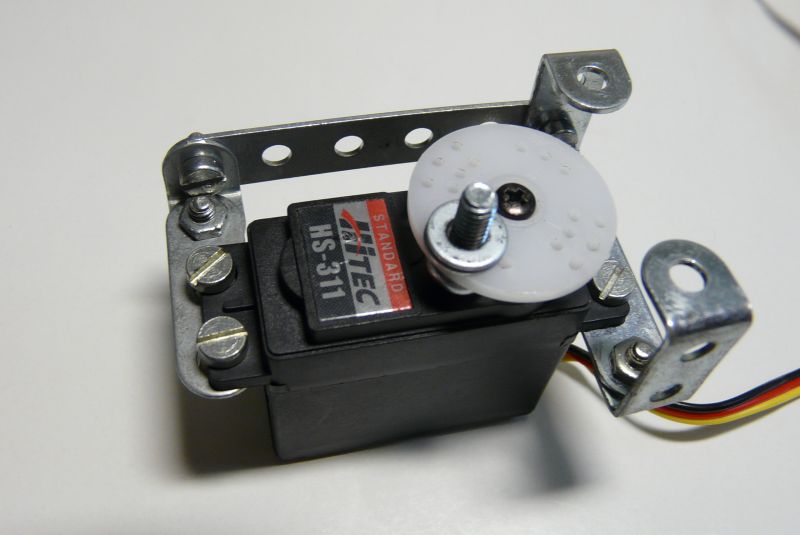
2. Přišroubování montážních pásků
Dle obrázku upevněte pásek se čtyřmi dírami a pásek se třemi dírami k servu.
Levé servo na obrázku je určeno pro levou nohu, pravé pro pravou. Všimběte si,
že osy obou serv jsou na levé straně.

|
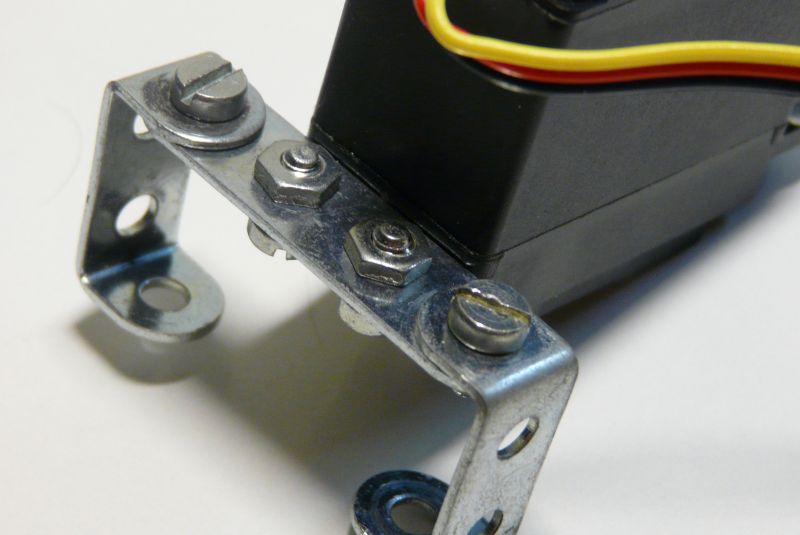
3. Upevnění úhleníku
Dle obrázku přidělejte úhelník k pásku se třemi dírami.
Je důležité, aby byl úhelník uchycen zespodu, přesně jak je to vidět v detailu
na obrázku.

|
4. Připevnění „U“ profilů
Podle obrázku připevněte dva „U“ profily k pásku se čtyřmi dírami.
Je důležité, aby profily byly (stejně jako úhelník v předchozím kroku) uchyceny
zespodu, přesně jak je to vidět v detailu.
|
5. Připevnění příčného pásku
Podle obrázku přidělejte příčný pásek s šesti dírami zeshora. Tento pásek
slouží k upevnění nohy k tělu robota.
V tomto bodě máme hotovou konstrukci kolem serva, která slouží pro
uchycení nohy k tělu a k sestavení jednoduchého mechanismu pro převod rotačního
pohybu na posuvný. Tím budeme dále pokračovat.

|
6. Přišroubování bílého nástavce
Do předvrtané díry na nástavci (krok 1) dejte zespodu šroub M4x12 s válcovou
hlavou a z vnější strany dejte dvě podložky (kvůli vymezení). Zatím nic
nešroubujte, to provedeme v dalším kroku.
Od teď budeme používat koupené šrouby a samojistné matice. Tyto šrouby slouží
jako klouby, proto je nikdy nedotahujte, specíální matice by měla zajistit, aby
se nepovolovaly.
|
7. Přišroubování dvou pásků
Dle obrázku přišroubujte pásek se třemi dírami na nástavec osy serva a pásek s
pěti dírami na horní „U“ profil.
Použijte koupené šrouby a samojistné matice. Slouží jako ohebné jednoosé
klouby.

|
8. Vytvoření mechanismu páky
Dle obrázku přišroubujte pásek se sedmi dírami na pásek se třemi dírami, který
je připevněn na ose serva (dle obrázku). Použijte koupené šrouby a samojistné
matice.

|
9. Sestavení vlastní nohy
Vezměte „L“ profil s deseti dírami a přišroubujte ho dle obrázku. Páka (na obrázku
krátký červený pásek) zvedá nohu a horní pásek s pěti dírami přidržuje nohu v
kolmém směru vůči podložce.

|
10. Dotyk nohy
Našroubujte úhelník na spodek nohy, jak je to na obrázku. Zlepšíte tím dotykové
vlastnosti s podložkou, po které bude robot chodit. Jelikož při chůzi bude mít
šroub tendenci se povolovat, je dobré ho pojistit kontramatkami.

|
Nyní je celá noha hotová. Před finální montáží doporučuji zkontrolovat, zda vše
pevně drží a všude, kde to bude možné, pojistit šroubky kontramatkami. Také
zkontrolujte, zda nejsou klouby zvedacího mechanismu příliš volné, případně
příliš utažené.
Zvedání nohy můžete vyzkoušet ručním pootočením serva, vzhledem k vnitřnímu
mechanickému odporu převodovky uvnitř serva to půjde ztuha. Zde je třeba říci,
že pootočením rotoru můžete servo zničit (zničení řídící elektroniky pomocí
indukovaného napětí v motoru), ale tato šance je velmi malá.
11. Přišroubování nohy k tělu robota
Noha je nyní hotová, zbývá ji připojit k tělu.
Do předvrtaných děr na křížových nástavcích serv v těle robota
přišroubujeme nohu stejně, jako je to na obrázku.
V těchto místech se přenáší otáčivý moment z motoru do nohy, proto se šroubky
rády povolují a je vhodné je opatřit kontramatkami.

|
Závěrem
Tento návod popisuje stavbu šestinohého chodícího robota z Merkuru po
mechanické stránce. Pro oživení je zapotřebí ještě řídící elektronika a ovládací
program. Modulů pro ovládání více servo najednou existuje mnoho a na
internetu je možné najít větší množství „domácích“ i profesionálních
konstrukcí.

|

|

|
Pokud vám některá část přišla méně srozumitelná nebo jste našli chybu či
nesrovnalost, ale i v případě, že se vám vše líbilo a chcete nás pouze
povzbudit, využijte našeho
kontaktního formuláře.
P.S.
Návod na výrobu vhodné elektroniky vyšel v časopisu Amatérské rádio - Praktická
elektronika 11/09. Detailní informace jsou k nalezení na adrese
http://servodriver.matejk.cz.