ASIMO v Praze
návštěva humanoidního robota
Robot ASIMO byl jedním ze členů japonské delegace, která do Prahy zavítala v rámci desetiletého výročí diplomatických styků. V pátek 22. srpna 2003 proběhla asi půlhodinová prezentace schopností tohoto robota v prostorách Panteonu Národního muzea. Ačkoliv se jednalo o krátké představení především pro novináře, bylo se nač koukat.

|
Základní údaje
ASIMO (Advanced Step in Innovative Mobility) byl poprvé představen
veřejnosti v listopadu roku 2000. Jedná se o úspešného nástupce těžkých strojů
P2 a P3 - ASIMO je menší (120cm) a řádově lehčí (52kg). Některé zdroje dokonce
uvádí 43kg, kterých bylo dosaženo další odtučňovací kůrou. ASIMO má 26 stupňů
volnosti. Dokáže chodit rychlostí až 1.6km/h nebo třeba i po schodech. V
rukách dokáže nosit menší předměty o hmotnosti až 2kg. Energii dodává
38.4V/10AH NiMH baterie, se kterou vydrží 30 minut. Jeho výška mu dovoluje
běžnou interakci s okolním prostředím. Díky svým 120cm dosáhne například na
vypínač, na kliku dveří či na klávesnici na desce stolu. K senzorové výbavě
robota patří například i dvě kamery, či akcelerometr a gyroskop.
Prezentace v Panteonu
Prezentace byla určena zejména novinářům (tj. laikům) a podle toho byla také
koncipována. Po úvodních projevech vyšel robot zpoza rohu, v ruce květiny, které
po chvilce váhání převzal funkcionář Národního muzea, aby je položil k bustě
Karla Čapka. Poté robot došel zhruba doprostřed místnosti, kde během prezentace
předváděl své dovednosti. Škoda, že jsme si dříve nevšimli černobílých značek na
podlaze, podle kterých se robot řídil. Mohli bychom si bývali vybrat atraktivnější
místo.

|
Moderátorem ukázky byl zástupce výzkumného ústavu, který robota navrhl.
Komentář se většinou omezil na ohlášení, co bude robot právě předvádět a tak
neobsahoval žádné pro nás robotiky "užitečné" informace.

|
Ukázky různých technik chůze po rovné podlaze byly následovány chůzí do a ze
schodů. Robotovi se do schodů moc nechtělo. Zastavil se a skoro to vypadalo,
že "přemýšlí". Důvodem prodlení byl fakt, že přestože účastníci ukázky
byli upozorněni japonsky i česky, aby během této prezentace nefotografovali
s blesky, že tohoto (i opakovaného) upozornění nedbali. Robot se totiž
snažil zaměřit svoji přesnou pozici vůči černobílým značkám před schody.
Stejné značky se nacházely i na plošině, ze které robot později sestupoval
po schodech dolů. O použitém algoritmu na chůzi po schodech hodně napověděla
připomínka komentátora, který v momentě, kdy robot začal sestupovat po schodech
dolů, mávl rukou a všem povolil fotografování. Tento fakt ukazuje na to, že
robot nepoužívá kameru během chůze po schodech, ale pouze před jejím začátkem.
Rozměry schodů mu tedy musí být dodány nějakým alternativním způsobem. Toto
zjištění nás zaujalo a proto jsme se tímto zabývali i nadále při hledání dalších
informací.
Další informace
Přestože první dojmy nebyly nic moc, později se nám podařilo najít pár zajímavých
informací. Najít nějaká fakta o tom, jak robot funguje "uvnitř" byl skoro nadlidský
úkol. Několik jich ale lze nalézt v ASIMO_Technical_Information.pdf.

|
Člověk by si skoro mohl říci – chodí, no a co... Na první pohled
nejsou vidět všechny detaily, které učitě musely být úspěšně vyřešeny. Je škoda,
že se Honda ve svých prezentacích omezuje pouze na konstatování, že jde o nejdokonalejšího
humanoidního robota vůbec. Asi se řídí heslem, že když se nepochválíte sami, tak
to za vás nikdo neudělá. Oficiální stránky http://asimo.honda.com/ jsou
už trošku střídmější a robota zasazují pouze do kategorie „jeden z nejdokonalejších”.
Jedním ze zajímavých detailů, který by stál za zmínku, jsou například malé
pružné výstupky na ASIMOvých chodilech. Podle měření provedených v rámci
výzkumu lidské chůze bylo zjištěno, že konstrukce lidského těla obsahuje mnoho
"měkkých" prvků, které ochraňují naše klouby od přílišné námahy. Vzpomeňte si
třeba na to, jak důležité je pro naše zdraví odpovídající obutí pro sportování
(basketbal, běh apod.). Naše klouby díky těmto „vydrží” vyšší námahu bez
poškození. Bez všech těchto „tlumičů” by musely být klouby robota daleko
robustnější, jinak by se stěží mohl pohybovat rychlostí 1,6 km/h. O nějakém
skákání si může nechat i tak jen zdát, protože malé pružné výstupky jsou
velmi zjednodušeným přiblížením těchto mechanismů.

|
Odměnou za další hledání bylo zjištění, že ASIMO ke svému pohybu využívá
také akcelerometr a gyroskop. Tyto senzory jsou přimontovány k tělu robota
a pomáhají zjišťovat aktuální orientaci torza. Robot dále používá enkodéry
zabudované přímo v každém kloubu. V každé ruce a noze je dále 6ti osý
senzor měřící síly působící na každou z končetin.
Bohužel se nám nepodařilo zjistit, jaký počítač robota ASIMO
vlastně řídí. Podle velikosti "batůžku" by to ale mohl být počítač celkem výkonný.
Předchůdce P3 byl vybaven čtyřprocesorovým „high-performace” systémem,
takže asi můžeme očekávat něco podobného.
|
Chůze
Honda se ale nejvíce chlubí vlastním algoritmem chůze, který má od svých
předchůdců ASIMO značně přepracován. Robot
P3
již sice uměl chodit celkem obstojně (jak se můžete sami přesvědčit na
video záznamech), ale pouze rovně anebo se otáčet na místě. Jeho chůze se skládala
z předem vytvořených vzorů, které pouze skládal za sebe. Výsledkem
bylo, že chůze vypadala nepřirozeně — při každé změně směru musel úplně
zastavit.
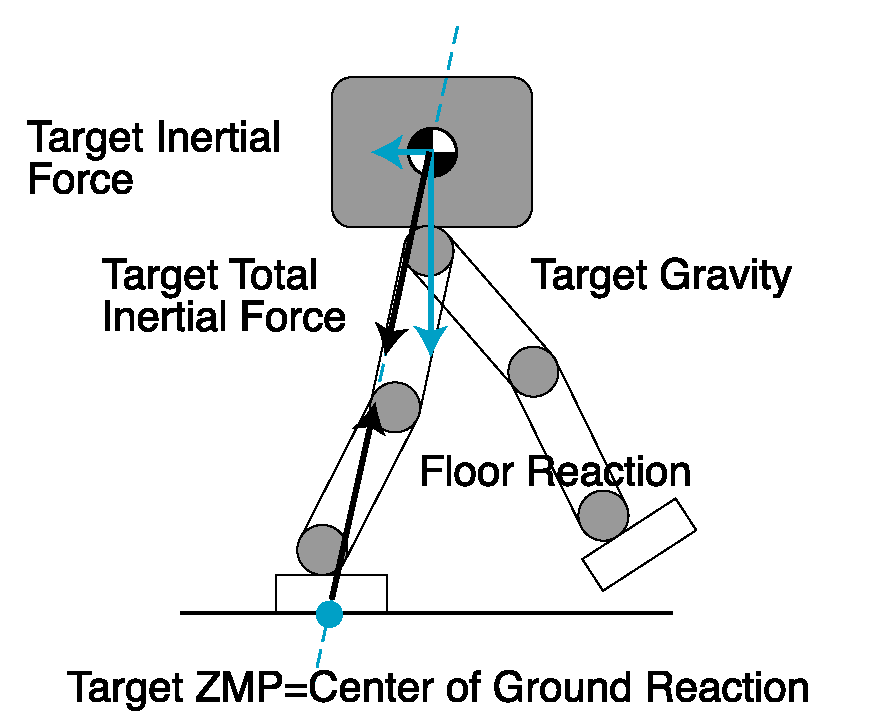
ASIMOva chůze obsahuje více reaktivních prvků. V každém kroku bere v úvahu
svoji setrvačnost a dokáže si vypočítat, v jakém stavu se bude nacházet po
vykonání dalšího kroku. Pokud tento stav neodpovídá stavu požadovanému, dokáže
úpravou délky, rychlosti či směru dalšího kroku dosáhnout zlepšení.
Důsledkem tohoto postupu je, že dokáže například chodit do kruhu. Zkoumáním
lidské chůze se zjistilo, že člověk, pokud chce zatočit během chůze, tak mírně
vychýlí své těžiště směrem, kterým chce zatočit ješte před tím, než dojde
k vlastnímu zatočení. Tohoto právě předchůdci robota ASIMO nebyli schopni, protože
se jejich chůze skládala z pouze přednastavených vzorů. Například po započetí
chůze vpřed nebyli schopni změnit ani rychlost ani délku kroku bez zastavení.
Vnímání okolí

|
ASIMOvi schopnosti reakce na své okolí pro nás byly asi největším zklamáním.
Po bližším zkoumání jsme zjistili, že ASIMO používá kameru pouze pro hledání
značek na podlaze (jak vidíte na obrázku). Nedokáže tedy vyjít po libovolných
schodech, ale jen po schodech, které mu byly předem změřeny a před které byly
umístěny příslušné značky.
Podle http://world.honda.com/news/2002/c021205.html ale ASIMO dokáže
využít kameru k rozpoznání gest či obličejů. Pokud uvidí známou tvář dokáže
pozdravit. Dokáže rozpoznat, i kdy mu človek chce podat ruku. O spolehlivosti
těchto (poměrně nových) dovedností by se ale asi dalo s úspěchem pochybovat.
Tyto pochybnosti může podpořit i fakt, že nic z nich nebylo v Panteonu
prezentováno nebo i skutečnost, že si ASIMO nepotřásl rukou s premiérem Špidlou
podruhé. Většina zpravodajských medií s chutí napsala, že ASIMOvi zřejmě není
náš premiér sympatický. Skutečnost může být ale daleko prostší — buď
byl ASIMO předem naprogramován pouze k jednomu podání ruky nebo rutiny
na rozpoznávání okolí nepracují zase až tak spolehlivě.
Jak složité je dosažení alespoň nějaké úrovně spolehlosti u robotů,
kteří se pohybují v předem neznámém prostředí a musí na něj reagovat, bychom
ale mohli dlouze vyprávět z vlastní zkušenosti. Proto by bylo vhodné
závěrem pochválit vývojáře Hondy, že i přes některé výtky, které jste v našem
článku mohli najít, postavili vyjímečného robota.

|

|
|

|

|

|
Máte-li jakékoli dotazy či připomínky –
kontaktujte nás.
Rádi vám odpovíme. Další informace o robotovi ASIMO naleznete například na
těchto stránkách:
- http://www.honda-robots.com/index_ori.html
- http://world.honda.com/ASIMO/ (pěkný 3D model, pouze IE)
- http://asimo.honda.com/index.asp
- ASIMO_Technical_Information.pdf
- How ASIMO Works
Další články o této akci: