ASIMO in Prague
a business trip of a famous humanoid robot
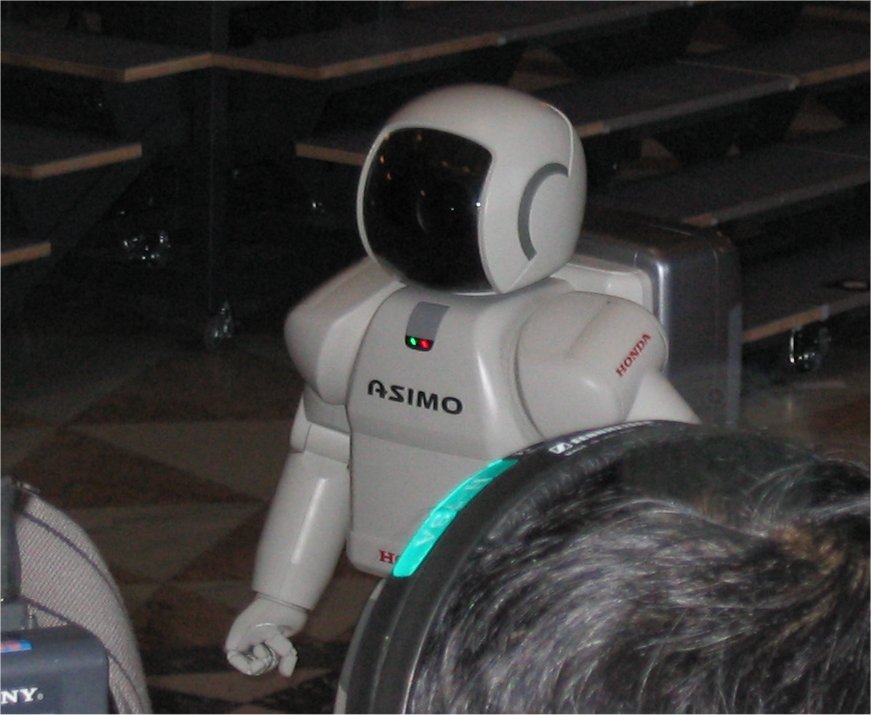
Robot ASIMO was part of a Japanese delegation that visited Prague to celebrate ten years of diplomatic contacts. On Friday the 22nd of August 2003 there was a 30 minute presentation of ASIMO's capabilities in the Pantheon of National Museum. Although it was only a short demo targeted at journalists, there was still something to look at.

|
Quick Info
ASIMO (Advanced Step in Innovative Mobility) was presented to public
in November 2000. It is a successor of heavy machines P2 and P3 — ASIMO is smaller
(120cm) and much lighter (52kg). Some resources speak even about 43kg, which were
achieved with another banting. ASIMO has 26 degrees of freedom. It is able to walk
as fast as 1.6km/h or climb stairs. It can carry small objects up to 2kg in each
hand. The power is provided by a 38.4V/10AH NiMH battery
that can keep the robot alive for 30 minutes.
The robot height allows common interaction with the environment. Due to its 120cm
it can reach switches, door-handles or a keyboard on the table. The sensor pool
contains for example two cameras, accelerometer and gyroscope.
Presentation in Pantheon
The presentation was targeted at journalists (i.e. amateurs).
After a short opening talk the robot appeared from behind the corner with flowers.
A hesitating moment and then a person from National Museum accepted the flowers. He lay
them down near the bust of Karel Čapek, the author of the R.U.R.
Then the robot walked approximately to the middle of the room,
where it presented its tricks. It was pity, that we did not notice before two black and
white calibration marks on the floor, used for precise robot positioning. We could
have chosen a slightly more attractive spot.

|
Moderator of the show was a representative of Honda development laboratory,
which designed the robot. Comments were mostly restricted to announcements of what
is robot going to do, so they did not contain any, for us robotics,
“useful” information.

|
The demonstration of various types of walking was followed by climbing
the stairs (up and down). The robot did not really fancy that task. It
stopped so it almost looked like it is thinking. The reason for this pause
were camera flash lights. Although all participants were warned (both in Czech
and Japanese) not to take any pictures with a flash during this presentation,
they ignore it. ASIMO tried to compute its exact position using black and white
marks in front of the stairs, and it probably could not see them very well.
Similar marks were also on the ramp, from which robot
later walked down. A big hint for how the walking algorithm works was a comment
of the moderator, who in the very moment when robot started to climb down the stairs
swept his hand and let people take pictures. This fact shows that the robot
probably does
not use cameras during the walk, but only beforehand for positioning.
The step size must be
entered via some alternative way. This fact interested us so we searched for more
information.
More information
Although the first impressions were not so positive, later we found some more
interesting details. It was almost herculean task, to find out how the robot
works “inside”. One of the better resources was
ASIMO_Technical_Information.pdf.

|
Ordinary people could say – well it walks, so what... At first sight
it is hard to see all the details, which had to be successfully solved. It is pity,
that Honda restricts its presentations to statements, that ASIMO is the best
humanoid robot ever. They probably use motto that if you do not commend yourself
nobody else will. The official web pages http://asimo.honda.com/ are
slightly more moderate and speak about the robot ASIMO as “one of the best”.
So why is ASIMO “so good”?
One of the details worth mentioning is, for example, usage of small projections on ASIMO's
feet. Studies of a human walk showed that construction of a human body contains
many such a “soft” elements. The main reason for them it to protect our joints
against too much pressure.
Notice how important are for our health good shoes for sport (basketball, run, etc.).
Our joints survive thanks to these elements without damage. Without these
“dampers” the joints would have to be much bigger otherwise our speed would be limited
to 1.6 km/h and we could only dream about jumping. ASIMO's small elastic projections
are a simplified version of these human mechanisms.

|
Another reward of the furious search was a discovery that ASIMO is using
accelerometer and gyroscope for its movements. These sensors are mounted on the
robot body and provide information about actual pose of the torso. Robot also
uses encoders built in each joint. Finally it has a 6axis force sensor in each
hand and leg, measuring stress in all extremities.
Unfortunately we did not find out what computer robot ASIMO controls. It could be
a very powerful computer guessing from the size of “backpack”. The predecessor P3 had
four-processor high-performance system, so we can expect something similar.
|
Walk
Honda is above all proud of its own walking algorithm, which has been seriously
improved when compared to older robots. Already robot
P3
was able to walk relatively well (as you can see on several video shots),
but only forward or to turn in place. Its walks is built from several prepared patterns,
which are then sequenced. The result is unnatural walk — it has to stop
whenever it wants to change direction.
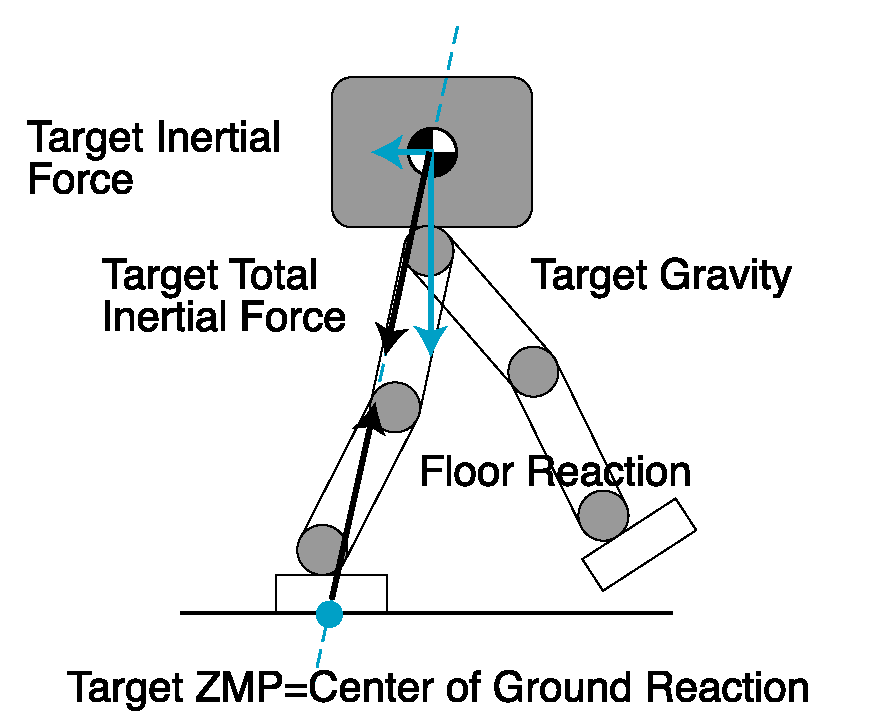
ASIMO's walk algorithm contains more reactive behavior.
In every step it takes into account
its inertia and it can compute/predict, in what state it will be in the next step.
If this state does not corresponds to desired state, it can modify length, speed
or direction of the next step to improve it.
One of the consequences is that ASIMO can, for example, walk in a circle. The research
showed that if a human wants to turn during the walk then he/she slightly leans
in the direction where he/she wants to turn and only
after that it starts to turn. This is
something what ASIMO ancestors were not capable of. During the sequence they could not
change neither speed nor step length.
Sensing of the environment

|
ASIMO's ability to react to the environment was the biggest disappointment for us.
Later we found out that robot uses camera only for searching the marks (as you can
see on the picture), and it can climb only stairs, which were beforehand measured and
exactly marked.
According to http://world.honda.com/news/2002/c021205.html ASIMO can
use camera for gesture and face recognition. If it sees known face it can greet.
It can recognize when a human wants to shake hand. It is easy to doubt the
reliability of these relatively new features. Nothing of this was presented in
Pantheon, and robot refused to shake premier Špidla's hand for the second time.
Some newspapers used this to state, that premier Špidla is probably not very sympathic
to the robot ASIMO, but
the reality is surely much simpler — either robot was preprogrammed
to shake hand only once or the routines are not very robust yet.
We could write long stories from our own experience about how difficult it is
to reach some level of reliability of robot that has to move in a beforehand
unknown environment and react to it. Therefore it would by proper to say that despite
of our somewhat critical comments have Honda developers built an exceptional
robot.

|

|
|

|

|

|
If you have any comments of questions –
kontaktujte nás.
More information about the robot ASIMO can be found on
these pages: