Jak programátor k robotovi přišel
Author: Pavel Jiroutek, 2002-12-05
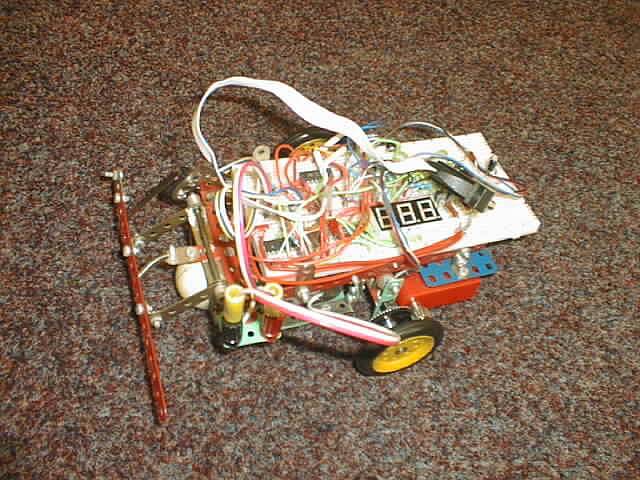
jednoduchá tříkolka
Jednoho dne jsem se rozhodl postavit si vlastního robota.
Příčina tohoto rozhodnutí byla jednoduchá – prostě jsem záviděl svému
robotickému okolí, že si má s čím hrát a já ne. Přece jen, hrát si s
autodráhou už se nehodí a robotika se ukázala jako výborné zábava. Brzy se
však ukázalo, že elektronika věda sama o sobě (navíc se jí asi nedá
vyhnout) a ve srovnání s programy se o dost náročněji ladí (jsem taky
programátor). Nakonec jsem se ale i přes počáteční chuchvalce drátů dostal
zdárně do cíle.
Co tedy můj robot (říkejme mu pracovně Robůtek I) umí?
- Je to taková tříkolka, která umí pomocí točení dvou bočních koleček
jezdit dopředu a dozadu a otáčet se o 90 stupňů – byl jsem líný pouštět se do
složitějších výpočtů polohy při jiných úhlech – také kvůli dále popsané
robůtkově featuře – rychlé ztrátě orientace.
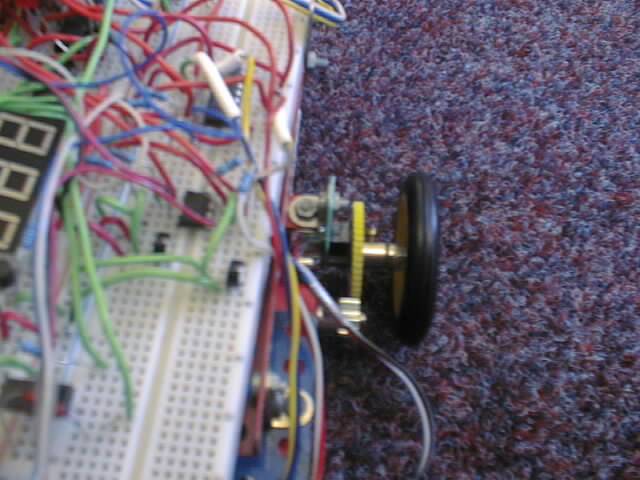
- Polohu počítá z informací dodávaných enkodéry, které jsou napojeny na
kolečka. Z počátku jsem používal infra-prosvěcování šesti dírek, které jsou v
malém převodovém kolečku o Merkura – stavebnice, ze které je celá konstrukce.
To bylo ale ďábelské „rozlišení”, které umožňovalo i Robůtkovi omezenému na
úhly 90 stupňů dostat se po chvíli provozu jakýmkoliv směrem do jakéhokoliv
bodu. Později jsem proto přešel na asi klasičtější řešení s černobílými
paprsky a jejich detekci CNYčkem.
- Jako mozek jsem pro Robůtka vybral jednočip AVR AT90S4433. Ani s touto
technologií jsem neměl žádné zkušenosti. Moje seznamování s ní proto
neprobíhalo nijak hladce, ačkoliv jsem nakonec na Robůtkovi použil stejný
čip, se kterým jsem si začínal hrát – uznávám, že hlavně díky velké odolnosti
tohoto jednočipu proti různým elektronickým „botám”.
- Robůtek umí zobrazovat, co si zamanete na tří číslicovém sedmi segmentovém
displeji.
Největší problém, který jsem s AVRkem řešil, byl výběr správného softwaru na
nahrávání programu do čipu a k němu odpovídajícímu kabelu. Kombinací je k
nalezení spousta. Snažil jsem se – kvůli své přirozené lenosti –
najít nejminimálnější funkční řešení. A že jsem vyzkoušel hodně variant! Také
kvůli jednomu velkému začátečnickému problému – nefungovalo mi vůbec nic
a já nevěděl, kde a jak hledat chybu. V zapojení AVRka? V kabelu? V softwaru?
Ve svém kódu do AVRka? Prostě hrůza.
Nakonec se ale vše v dobré obrátilo a správnou kombinaci jsem našel. Nezní
to jednoduše?
- Vezmu AVR-studio
- Napíšu v něm kód v Céčku
- Přeložím AVR-GCCčkem přidaným do AVR-studia jako externí kompilátor
- Přeložený kód nahraji IC-PROGem přes FUN-CARD kabel do vypnutého
AVRka v základním zapojení
- Zapnutím AVR po odpojení kabelu se program spustí
Takže mám program v AVRku, vím o tom, že tam je, a umím ho spustit. Co
tedy můj program s Robůtkem umí? Ušetřím Vás desítek testovacích prográmků na
blikání ledek, testování tlačítek, funkce časovačů a přerušení. Jako svou
poslední aplikaci před rozebráním konal Robůtek následující:
Pohyboval se po pomyslných čtvercích rozměrů asi 25x25 cm (celý
robot se vejde do čtverce). Na začátku byl v jednom pevně daném čtverci
a měl za úkol dostat se do čtverce, který byl na začátku vložen pomocí
tlačítka a nárazníku. Ve čtvercích v robotově cestě ale mohly být
překážky. Když robot na takovou překážku narazil (předním nárazníkem),
zapamatoval si ji v EEPROM, vrátil se do předchozího čtverce, ve kterém
překážka nebyla a našel jinou nejkratší cestu do cíle, která nevedla
přes čtverce, na nichž byly už zjištěné překážky.
Zde je stručný popis použitých postupů a odkazů na stránky, z nichž
jsem čerpal. Na nich také najdete příslušná schemata, která už se snadno
zkombinují do funkčního celku. Konkrétní součástky, které budu
označovat kódem, se dají pod tímto kódem najít v katalogu a zakoupit v
obchodu GM Electronic v Praze na Florenci.
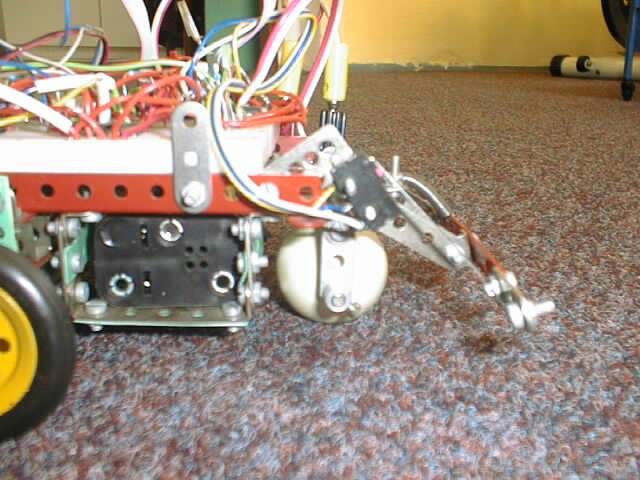
- Kostra a motory
- Kostra robota je postavena výhradně ze stavebnice
Merkur. Přední kolečko je
vyrobeno s pingpongového míčku s navlečenou osičkou uprostřed. Dva
stejnosměrné motůrky pochází ze stavebnice
Merkur 2.1.Pozor! V
jedné stavebnici je pouze jeden motorek!
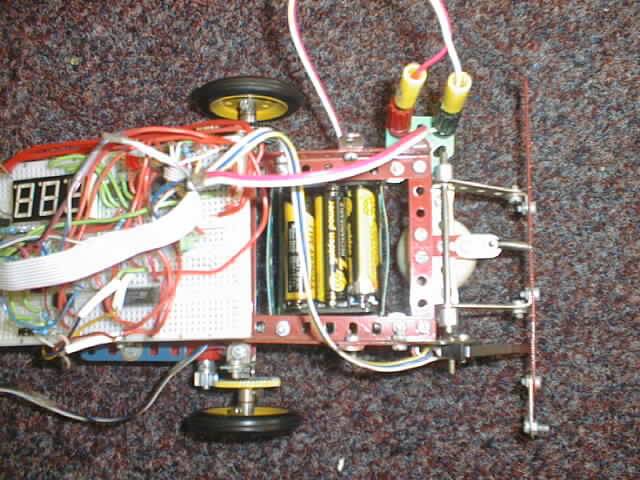
- Napájení
- Jako jediný zdroj napětí na robotovi používám 5
akumulátorových tužkových monočlánků zasazených do pouzdra na monočlánky
A306361.
- Základní deska
- Jako jedinou desku na součástky používám
nepájivé kontaktní pole N-ZSB212, které výrazně usnadňuje začátečnickou
konstrukci, a zjednodušuje testování. Jeho nevýhodou je snížená přehlednost,
když je na něm více zapojení, a větší rozměry o proti klasickému plošnému
spoji.
- Řídící jednotka
- Jako řídící jednotku jsem použil microcontroller
AT90S4433 od firmy
Atmel. Vyznačuje se nízkou cenou (asi
170kč), není nutné používat vnější programátor, má dostatečné množství I/O
linek (20), 4kB paměti na kód, 256B EEPROM (vnitřní programem měnitelná,
stálá (používám ji na ukládání informací o jednotlivých čtvercích)). Je
snadno dostupný poměrně použitelný software. Základní schema zapojení se dá
najít na této stránce.
Pro funkci CPU je v podstatě potřeba zapojit pouze krystal
(Q8MHZ) k pinům XTAL1,2 s přilehlými dvěma kondenzátory, napětí (asi 5V) na
VCC a zem na GND. Vše ostatní už je navíc. Programovací kabel ani software,
zmiňovaný na té stránce, se mi neosvědčily.
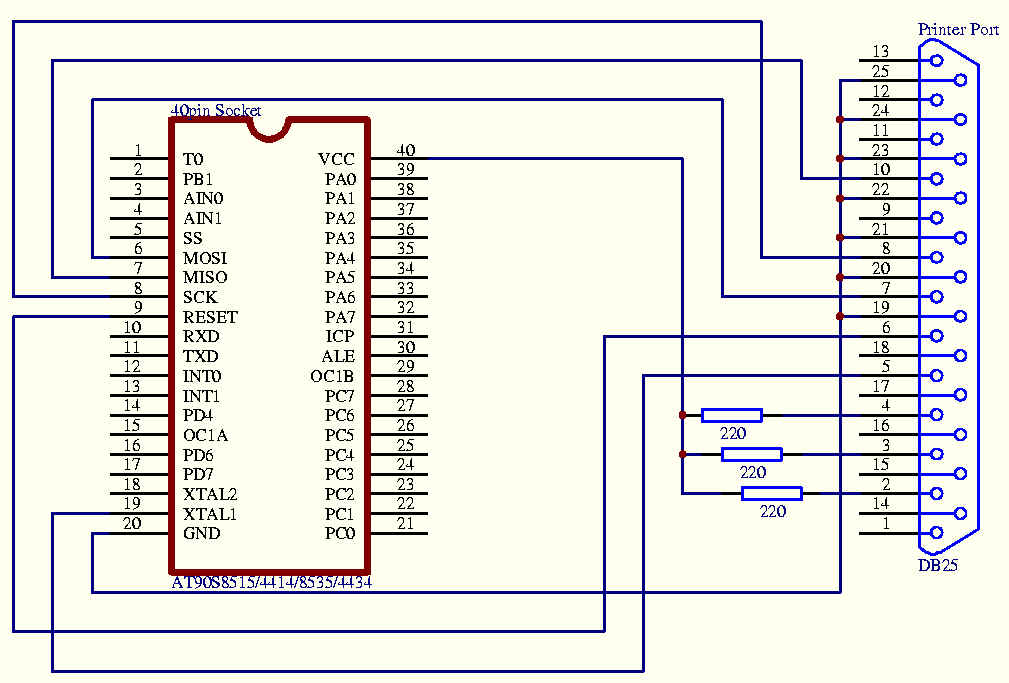
- Programovací kabel
- Pro programování CPU používám jednoduchý
kabel, který najdete zde.
Jsou k němu potřeba jen 3 odpory 220 ohmů (RR220R) a konektor do LPT portu
(CAN25V).
- Software
- K psaní programu používám AVR-studio
od firmy Atmel, ve kterém se dají s výhodou ladit aplikace i na simulátoru
procesoru. Sharewarová verze sice neobsahuje kompilátor jazyka C, ale od
AVRFreaks se dalo stáhnout AVG-GCC,
které šlo používat podle přiloženého návodu jako kompilátor uvnitř
AVR-studia. V nové verzi AVR-studia (4.0) ještě externí kompilátor používat
nelze, takže se hodí pouze pro psaní v
AVR-assembleru. K nahrání
přeloženého programu do CPU používám program
IC-PROG. Pro výše popsaný kabel
je potřeba v nastavení adaptéru v programu vybrat ze seznamu „Fun-card”.
Pokud jste s mikrokontrolery ještě nepracovali, určitě si přečtěte i článek
Blikáme LEDkou, který jsme pro vás pro tyto účely připravili.
- Display
- Pro zobrazování hlášek robota používám třímístný
sedmi segmentový displej s multiplexováním (HD-514RD -tento kód je pro
čtyřmístný (třímístný nemůžu najít v katalogu)). Jako driver displeje
(převodník se 4 vstupy udávajícími zobrazované číslo binárně a 7 výstupy,
které ovládají jednotlivé ledky na displayi) používám
DM74LS47.
Principiálně není potřeba, ale šetří výstupy CPU o tři a usnadňuje zobrazování čísel…
Displej je řízen multiplexovaně, takže pomocí časovače v CPU, který v
přesných intervalech střídavě zobrazuje číslice na jednotlivých místech
displeje, je dosaženo efektu ovládání všech míst současně za použití jen tří
výstupů CPU navíc.
- Řízení Motorů
- Motory jsou řízeny pomocí dvojitého H-bridge
L293D, jehož aplikaci
můžete najít například
zde.Tedy pomocí
čtyř výstupů CPU je řízen pohyb obou motorů vpřed a vzad.
- Enkodéry
- Na každém z obou koleček je připevněn kotouček s
černobílými paprsky, které jsou snímány optočlenem
CNY70. Jeho analogový výstup
se převádí na digitální například
takto. Pomocí trimru
(v obvodu označen jako R4) PT6HK010 se nastaví práh pro komparátor
LM393
mezi černým a bílým políčkem. Výstupem hradla je už digitální signál
(černá/bílá).
Zaujal vás tento článek? Našli jste věcnou chybu či překlep? Nebo něčemu
nerozumíte?
Napište nám!
{kind=link}