Odroid H4+
embedded PC
Řídící počítač pro Matthyho M01, M02, M03 …
Napájení
- dohoda, že budeme používat XT60
- povolené napájení 15-20V
- https://www.bighobby.cz/li-pol-baterie-3500mah-4s-60c--120c--bighobby-nano-tech/ — 4S, 3500mA (limit do letadla je 6.5A)
- https://www.bighobby.cz/nabijeci-kabel-20cm--14awg-4mm-bullet--xt60-samec-2/ — nabíjecí kabel
indikace napěti:
- https://www.bighobby.cz/meric-napeti-akumulatoru-1-6s/ — je treba zapojit zprava, červená žíla je uprostřed pro příště jiný pípák:
- https://www.bighobby.cz/bzucak-a-meric-napeti-clanku--az-8s/
For high performance computing and/or multiple storage devices, at least a DC 15V/4A power adapter is strongly recommend.
- AC 100~240 Volt input
- DC 15Volt / 4A output
- Switching mode power adaptor
- EU compatible
- Connector specification : inner(positive) diameter 2.1mm and outer(negative) diameter 5.5mm
- Cable Length : 100cm
Napájecí konektor má 4 pružinky a pro spolehlivé napájení je třeba aby pružinka byla i na jacku!
Install
1) je potřeba sshd, aby se člověk mohl rozumně přihlásit a kopirovat přikazy atd.
Toto je třeba udělat ještě s klávesnicí a monitorem. Také se hodí mít editor, ifconfig,
git, screen, …
sudo apt install vim sudo apt install net-tools sudo apt install openssh-server sudo systemctl restart sshd.service sudo apt install screen sudo sshd -t -f /etc/ssh/sshd_config sudo apt install git sudo apt install python3-pip pip install virtualenvwrapper cd git/ mkdir bare cd bare/ git init –bare osgar.git git init –bare osgar-apps.git git init –bare matty.git vim ~/.bashrc mkdir ~/logs sudo adduser robot dialout workon osgar mkvirtualenv osgar cd git/ git clone /home/robot/git/bare/osgar.git/ cd osgar/ git pull git checkout feature/matty python -m osgar.logger pip install -r requirements.txt pip install depthai sudo wget -qO- https://docs.luxonis.com/install_dependencies.sh | bash export OSGAR_LOGS=/home/robot/logs export PYTHONPATH=/home/robot/git/osgar:/home/robot/git/osgar-apps sudo mv 90-estop.rules lora.rules /etc/udev/rules.d/
Network
- Matty M02 — 192.168.1.102
nmcli connection modify "Wired connection 2" ipv4.method manual ipv4.address 192.168.1.102/24 nmcli connection up "Wired connection 2"
Pozn. Ethernet 1 je ten dál od napájení (vpravo), rezervovaný pro DHCP na síti. Eth2 je pak statická adresa výše.
Q & A
1) Jak zjistit, které IP adresy jsou aktivní v dané podsíti? (např. pokud na Odroidu běží DHCP, ale nevíme, jakou IP adresu dostal)
nmap -sP 192.168.0.*
2) Jak používat nmcli?
robot@m03-odroid:~$ nmcli d DEVICE TYPE STATE CONNECTION enp1s0 ethernet connected Wired connection 1 wlxe0e1a93a0bec wifi disconnected – enp2s0 ethernet unavailable – lo loopback unmanaged –
robot@m03-odroid:~$ sudo nmcli r wifi on
sudo nmcli d wifi connect SSID password PASSWORD
3) Jak synchronizovat logy?
rsync -v -a –progress robot@192.168.0.144:/home/robot/logs/ /data/dtc/system/
… případně viz subt/tools/allsync.py
4) Jak automaticky bootovat do systému?
Del na startu, BIOS, Chipset - PCH-IO Configuration - State After G3 změna z S5 state na S0 state
5) Jak nastavit hlasitost?
robot@m00-odroid:~$ pactl list sinks short
8 alsa_output.pci-0000_00_1f.3.analog-stereo module-alsa-card.c s16le 2ch 44100Hz SUSPENDED
robot@m00-odroid:~$ pactl list sources short
3 alsa_input.pci-0000_00_1f.3.analog-stereo module-alsa-card.c s16le 2ch 44100Hz RUNNING
9 alsa_output.pci-0000_00_1f.3.analog-stereo.monitor module-alsa-card.c s16le 2ch 44100Hz SUSPENDED
robot@m00-odroid:~$ pactl get-default-sink
alsa_output.pci-0000_00_1f.3.analog-stereo
robot@m00-odroid:~$ pactl get-default-source
alsa_input.pci-0000_00_1f.3.analog-stereo
robot@m00-odroid:~$ pactl get-source-volume 3
Volume: front-left: 51059 / 78% / -6,50 dB, front-right: 51059 / 78% / -6,50 dB
balance 0,00
robot@m00-odroid:~$ pactl get-sink-volume 8
Volume: front-left: 65536 / 100% / 0,00 dB, front-right: 65536 / 100% / 0,00 dB
balance 0,00
robot@m00-odroid:~$ pactl set-source-volume 3 50%
robot@m00-odroid:~$ pactl get-source-volume 3
Volume: front-left: 32768 / 50% / -18,06 dB, front-right: 32768 / 50% / -18,06 dB
balance 0,00
6) Kam zapojit repro-jack?
A: do HORNÍ zdířky.
USB porty
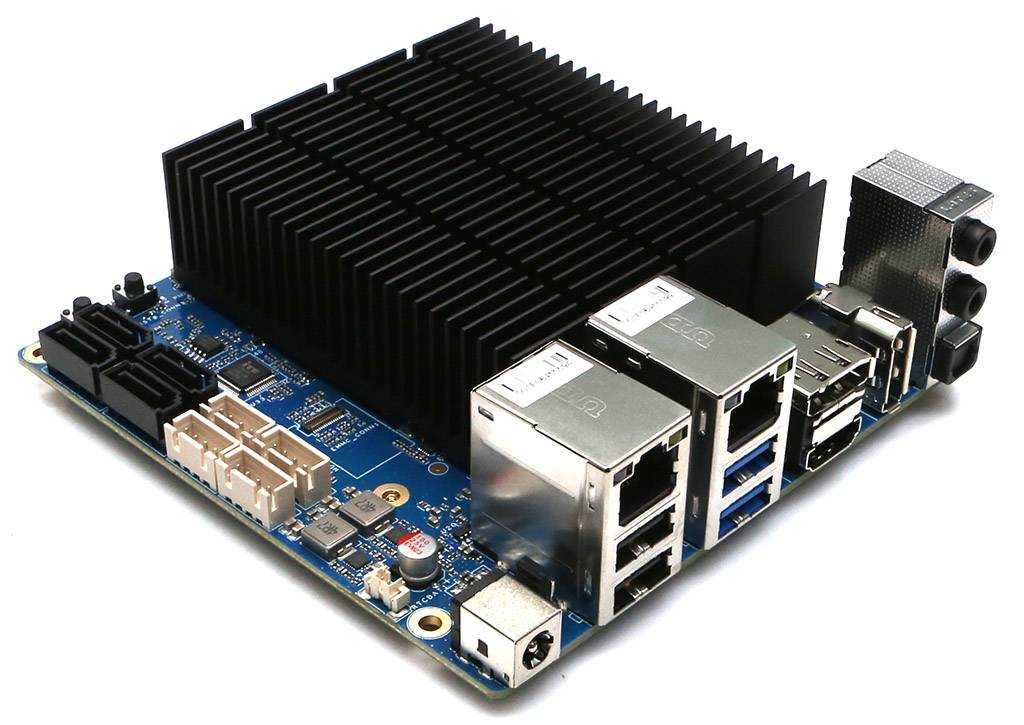
Dnes jsem narazil na problém, že nová OAK-D Pro kamera nefungovala na již nainstalovaném Odroidu. Ale nefungovala ani ta stará! Důvodem je, že
vlevo pod Eth zástrčkou jsou USB 2.0 a vpravo jsou USB 3.0. Fungují pouze ty s 3.0. Doplňuji tedy obrázek z:
https://www.hardkernel.com/shop/odroid-h4/

{kind=link}
- A. CPU (Intel N97 or N305 )
- B. 1 x DDR5 SO-DIMM slots (Single channel memory support)
- C. 1 x M.2 PCI Express Module Socket (NGFF-2280)
- D. 1 x eMMC (Embedded Multimedia-Card) Socket
- E. 4 x SATA Power Connectors (2.5mm pitch, JST-XH compatible connector)
- F. 4 x SATA3 6.0 Gb/s Data Connectors
- G. 1 x DC Power Jack
- H. 2 x USB 3.0
- I. 2 x USB 2.0
- J. 1 x HDMI 2.0
- K. 2 x DisplayPort 1.2
- L. 2 x RJ45 Ethernet Ports (10/100/1000/2500)
- M. 5 x System LED Indicators
- N. 1 x Peripheral Expansion Header (24-pin)
- O. 1 x Power Switch
- P. 1 x Reset Switch
- Q. 1 x Backup Battery Connector (2-pin)
- R. 1 x Active Cooling Fan Connector (4-pin)
- S. 1 x Audio out, 1 x Audio in, 1 x SPDIF out