SubT STIX in Ten Weeks
Robotika.cz Team
DAPRA organizes training rounds called STIX (SubT Integration Exercise), where the first one is in April 2019 in Colorado. Although the STIX is for System Track only we plan to work simultaneously also on Virtual Track. This is English blog for the next three months … Update: 20/5/2019 — CERBEROS and CRAS videos from Colorado
Week 1
23rd January 2019 — official announcement
Last night there was an official DARPA announcement of qualified teams for STIX
(SubT Integration Exercise):
So now it is suitable time to start the blog and report status. Note, that
there was a relatively long „prelude” period, which you read at
Rules and
Prelude (both in Czech).
The Robotika.cz team is based on several former
Robotour teams:
- ND Team
- Eduro Team
- Cogito Team
- Short Circuits Prague
and members of robotika.cz. We suppose that it will
evolve as the DARPA SubT Challenge is scheduled for several years …
For STIX in Denver/Colorado we plan to use robots Robík and Eduro:


24th January 2019 — Štola Josef
Today we visited Štola Josef
(tunnel Josef) as potential place for testing and preparation for STIX in
April. It was „joint event” with the opponent team
CRAS (Center for Robotics and Autonomous
Systems), which is the 2nd Czech team qualified for
DARPA SubT Challenge STIX. The
goal today was to discuss the possibility and conditions with the tunnel
owner.
It was definitely worth it, although there were so many failures starting with
dead battery in the car, bad contact number, dead battery in my camera (I am
used to that one, so I had spare), but also dead Eduro computer, which I really
did not expect and I did not have backup. Next time. It was also freezing and
the entrance was decorated with jaw-like stalactites.
The tunnel was very nice and it could surely imitate Edgar's mine in
Colorado. It was actually too nice (during summer it is open for public), the
rails were below floor surface or covered by stones, clean, dry. We learned
that dripping water is typical as well as mud or small pools.




|

|

|



27th January 2019 — STIX Artifacts Specification
The teams for STIX in April 2019
already received a list of five selected artifacts, which will be used. They are
grouped into common artifacts for all three events (Tunnel, Urban, Cave)
and event specific.
 STIX Artifacts |
 Drill |
 Fire extinguisher |
 Backpack |
 Cell phone |
 Survivor |
This selection is good for us — our qualification video used trained network
for backpack, person/survivor and fire extinguisher. The processing was
relatively slow, so we may start with „detect red pixels” as our first
submission to Virtual Track.
28th January 2019 — Virtual Track - narrow passage

There is a very narrow passage in the virtual environment of qualification
world. It is on the left side behind the fire extinguisher (our first
successfully reported artifact). Yesterday I placed robot X2 at -x 158 -y
139 -z -14.8 in order to examine LIDAR data and check if the passage is
passable with the wheeled machine … and it is!
The robot actually went through, turned right and followed the wall until it
has seen red backpack, and because I did not change the strategy, it turned 180
degrees and tried to return to the original start position (via measuring
distance traveled). The way back did not work. After 3.5 hours of simulation I
could see on terminal that the pose did not change:
…
3:29:00.023172 (3.8 32.2 0.0) [('pose2d', 452), ('rot', 453), ('scan', 181)]
3:30:00.016049 (3.8 32.2 0.0) [('pose2d', 458), ('rot', 457), ('scan', 183)]
3:31:00.060268 (3.8 32.2 0.0) [('pose2d', 448), ('rot', 448), ('scan', 179)]
After review of the output (time, (X, Y, Z) position and statistics of received
OSGAR messages in the last minute) I could see that the artifact was found
after 2 hours:
…
1:59:00.000973 (54.7 61.0 0.0) [('pose2d', 418), ('rot', 418), ('scan', 167)]
2:00:00.041863 (55.6 61.0 0.0) [('pose2d', 419), ('rot', 419), ('scan', 168)]
Published 106
Going HOME
2:00:02.348407 turn 90.0
2:00:18.360198 stop at 0:00:00.389300
2:00:18.360198 turn 90.0
2:00:34.706420 stop at 0:00:00.670223
2:01:00.038746 (55.2 61.2 0.0) [('artf', 1), ('pose2d', 405), ('rot', 405), ('scan', 162)]
2:02:00.028133 (54.3 61.2 0.0) [('pose2d', 419), ('rot', 419), ('scan', 168)]
2:03:00.039347 (53.5 61.4 0.0) [('pose2d', 426), ('rot', 425), ('scan', 170)]
…
and the robot was stuck 18 minutes later:
…
2:14:00.054387 (3.9 45.2 0.0) [('pose2d', 400), ('rot', 401), ('scan', 160)]
2:15:00.018687 (3.9 37.4 0.0) [('pose2d', 388), ('rot', 388), ('scan', 155)]
2:16:00.010633 (3.8 32.7 0.0) [('pose2d', 406), ('rot', 405), ('scan', 162)]
2:17:00.040365 (3.8 32.2 0.0) [('pose2d', 423), ('rot', 424), ('scan', 170)]
2:18:00.053812 (3.8 32.2 0.0) [('pose2d', 457), ('rot', 457), ('scan', 183)]
…
The position was at the entrance to narrow passage but on the other side. It
seems to me that it is asymmetric, and there is different slope on the left and
on the right side of the entrance.
Another reason could be simulation timeout (20 minutes of simulated time),
because I had to change distance to the wall from 1.5 meters to 0.8 meters and
so the robot moved automatically slower.
Finally a detail, which I realized this morning … I did not change the
parameter for wall following for the way back so it would not pass through
anyway … I guess.
Note, that the surface is variable 3D terrain so to properly decide what to do
with 2D lidar scan only is a challenge:
|
|
|
Week 2
1st February 2019 — Eduro and Robík testing at home
We did a couple of test of Eduro and Robík robots at home. I took Eduro to dark
basement, where are many storage places and narrow passages and PavelS repeated
tests with osgar.go1m code to verify OSGAR driver functionality. Both log
sets are available for download:
robik-190130-hallway.zip
and
eduro-190129-basement.zip
(my bad with the zip file name for Robík, should be 190129 as log files inside).
If you would like to visualize the data you can use osgar.tools.lidarview
which now provides visualization of scan, pose2d and lidar data
(#132).

It did not work very well (probably no surprise). The entires were too narrow
so Eduro decided to turn around instead. What was worse it stopped in the
corner without further activity — that has to be fixed (we probably have
similar issue in the Virtual Track).
Test of Robík was slightly better. We learned that it is necessary to wait
for LIDAR until the rotation speed stabilize and data with orientation are
ready. Also ramping the speed was not properly working in the low level SW, so
we may need to add wrapper in OSGAR driver. Tonight we plan to test and
integrate OpenCV driver for camera
(#134) and then we should be
ready to use the same high level SW for both our SubT robots.
3rd February 2019 — STIX Group Assignments
Yesterday we received e-mail STIX Group Assignments. where my first
reaction was „proč zrovna my jsme Béčko” (why we are the B-team), inspired by
Jára
Cimrman/Posel z Liptákova. We decided to buy plane tickets on 31st January,
because we were warned that it was Lufthansa action price and it will change on
1st February … and it went up by 5000 CZK, but … never mind. I no longer
complain that we will test in Colorado with the second Czech team CRAS … it
could be fun.
Group 1
- CSIRO
- Pluto (Pennsylvania Laboratory for Underground Tunnel Operations)
- CERBERUS (CollaborativE walking & flying RoBots for autonomous ExploRation in Underground Settings)
Group 2
Group 3
- CoStar JPL/Caltech/MIT team-CoSTAR (Collaborative SubTerranean Autonomous Resilient Robots)
- Explorer
- CRETISE
p.s. as I was looking through the list of teams to find some URL there was
often funded by DARPA, so I check older announcements
DARPA Selects Teams to Explore
Underground Domain in Subterranean Challenge (2018-09-26):
DARPA has selected seven teams to compete in the funded track of the Systems
competition:
- Carnegie Mellon University (Explorer)
- Commonwealth Scientific and Industrial Research Organisation, Australia (CISRO)
- iRobot Defense Holdings, Inc. dba Endeavor Robotics (CRETISE)
- Jet Propulsion Laboratory, California Institute of Technology (CoStar)
- University of Colorado, Boulder (MARBLE)
- University of Nevada, Reno (CERBERUS)
- University of Pennsylvania (Pluto)
… so it is 7 sponsored teams + 2 Czech teams … hmm … interesting.
The Carnegie Mellon team, including a key member from Oregon State
University, is one of seven teams that will receive up to $4.5 million from
DARPA to develop the robotic platforms, sensors and software necessary to
accomplish these unprecedented underground missions.
(source)
Week 3
7th February 2019 — OSGAR v0.2.0 Release
Yesterday we released OSGAR v0.2.0. It
contains all HW drivers necessary for both Eduro and Robík robots and new
osgar.tools.lidarview for log files analysis and debugging. There are also
several small features like base class Node for easier creation of new
nodes and drivers, environment variable OSGAR_LOGS for definition of logs
storage place, and launcher for faster application prototyping.
From the programmers point of view LogReader is now directly iterator
so it can be used as file open():
for timestamp, stream_id, data in LogReader(filename, only_stream_id=LIDAR_ID):
print(timestamp, len(data))
There were also couple of tweaks motivated by SubT Challenge, primarily by
Virtual Track. As the simulation can take several hours there is a fix for time
overflow (resolution in microseconds, the limit used to be 1 hour). Also TCP
driver now supports various options necessary for communication with ROS. The
release of node ROSProxy implementation was postponed to the next release,
mainly with the goal to simplify necessary user configuration.
The most visible progress is on lidarview:

If you would like to replay this test, log file is available here and you can visualize it with:
python3 -m osgar.tools.lidarview subt-190204_192711.log –lidar
rosmsg_laser.scan –camera rosmsg_image.image –poses app.pose2d
You can use 'c' to flip camera on/off, +/- for zooming and SPACE for pause. A
simple map from point cloud is displayed in camera off mode.
9th February 2019 — Virtual Track - two X2 robots
Last night we run simulation with two X2 robots (small and fast ground
vehicles). There was a need for small tweaks to run OSGAR ROS Proxy in two
instances (extra ports) but at the end it worked! And it was definitely
more interesting to watch than TV … but everything is, so no big deal.

The strategy was simple: one robot (X2L) followed the left wall while the
other (X2R) followed the right wall. The code was identical to version
0 — follow the wall until you find an artifact, turn 180 degrees and follow
the other wall for previously measured distance. This way the robot should
return close to starting area and report to Base Station should be
successful.
After few screenshots, I went to bed … and one robot finished simulation in
almost 3 hours, while the other in 5 hours. Both were convinced to reach the
start which was not quite right in the reality … and now it is time to review
the log files.


Well, the left robot went fine except when it reached the start area the
entrance was detected as wall (maybe bug in the world?) and returned couple of
meters. But the base station was close so the report was delivered
(theoretically).
The right robot „overlooked” the valve artifact and continued to red
backpack. But it did not make it back probably due to simulation time timeout
20 minutes.


It was interesting to see with a generated map how it is difficult to judge if
a tunnel is blocked (dead-end) or only the LIDAR view is temporarily blocked by
robot tilt.

On the generated map you can see that the integrated error is not too big,
approximately 1 meter, and thus it is sufficient for report with 5 meter
precision radius.
BTW why are we „wasting time” with virtual track when we have sharp
system track deadline?! Well, we will probably use the same or very similar
strategy and because the robots are not here at the moment, we can at least
prepare for virtual track qualification (locate 8 artifacts in 20 minutes
of simulation time by the end of April 2019).
p.s. after Jirka parameter tuning both robots returned to the start area, but
… somehow it looks like they „hit the wall”


Note, that X2L simulation took only 47 minutes to return with artifact
position while X2R timeout in 6 hours!? Well, the X2L went straight
until classified the other robot as an artifact and returned home.


Week 4
12th February 2019 — JPEG Red Alert!
We played with artifacts classification over weekend and when we tried to replay
detection of fire extinguisher it failed:
M:\git\osgar\examples\subt>python -m osgar.replay -module detector subt-190208_200349.log
b"['subt.py', 'run', 'subt-x2-right.json', '-note', '2x X2_SENSOR_CONFIG_1, rig
ht, commented out asserts for name size']"
['app.desired_speed', 'app.pose2d', 'app.artf_xyz', 'detector.artf', 'ros.emerge
ncy_stop', 'ros.pose2d', 'ros.cmd_vel', 'ros.imu_data', 'ros.imu_data_addr', 'ro
s.laser_data', 'ros.laser_data_addr', 'ros.image_data', 'ros.image_data_addr', '
ros.odom_data', 'ros.odom_data_addr', 'timer.tick', 'tcp_cmd_vel.raw', 'tcp_imu_
data.raw', 'tcp_laser_data.raw', 'tcp_image_data.raw', 'tcp_odom_data.raw', 'ros
msg_imu.rot', 'rosmsg_laser.scan', 'rosmsg_image.image', 'rosmsg_odom.pose2d']
['image'] ['artf']
{24: 'image'}
{4: 'artf'}
Exception in thread Thread-1:
Traceback (most recent call last):
File "D:\WinPython-64bit-3.6.2.0Qt5\python-3.6.2.amd64\lib\threading.py", line
916, in _bootstrap_inner
self.run()
File "M:\git\osgar\osgar\node.py", line 40, in run
self.update()
File "M:\git\osgar\examples\subt\artifacts.py", line 42, in update
channel = super().update() # define self.time
File "M:\git\osgar\osgar\node.py", line 32, in update
timestamp, channel, data = self.bus.listen()
File "M:\git\osgar\osgar\bus.py", line 81, in listen
channel = self.inputs[stream_id]
KeyError: 4
Hmm, that is really strange — there was no artifact reported at that time?!
Note that record & replay is the key feature in OSGAR: you record your
logfile as the robot navigate and later, typically on your notebook, you can
analyze various situations „what happened?”. The prerequisite is that the
replay is identical to original run. In this particular example the simulation of
SubT Virtual Track was on different notebook with Ubuntu and ROS.
The simplified artifact detection is split into two phases:
- search for sufficiently red objects
- if you find local red maxima run classification
So what happened was that the redness of the JPEG compressed image was
different on each machine. If we classify pixels as RED then their count
differs!
It is yet another detail you should check before you deploy the code on the
target machine. Surprisingly newly added unit tests for counting red pixels
in uncompressed JPEG image pass on machine with GPU support (our primary
simulation platform).
This has to be investigated and we surely have to check also installations on
Eduro and Robík robots.
 Fire Extinguisher |
 Backpack |
And one joke at the end: this is recording from the run when two X2 robots
met. You would guess that they are blue, but they are obviously not.
|
p.s. note, that these are 1:1 output images from ROS simulation, topic
/X2/camera_front/image_raw/compressed with X2_SENSOR_CONFIG_1 and
resolution 320x240.
p.s.2 Loading jpg files gives
different results in 3.4.0 and 3.4.2 … and yes, the versions are different
3.4.4 on ROS notebook, 3.4.0 on simulation machine with GPU and 3.3.0 on my old
notebook …
14th February 2019 — Return strategy ver1
Yesterday we tried to complete Virtual Track with two robots X2 returning
after detection of the first artifact. If I ignore some some typo detail both
robots returned and send these reports:
TYPE_VALVE 231.74 -60.89 -14.80 TYPE_EXTINGUISHER 157.37 138.87 -15.09
But the Base Station did not accept it for some reason, so it is still work
in progress, again.
Last night we also discussed the faster return strategy. Current version 0
simply follows the wall back for given distance traveled. This means that if
there is some dead-end branch robot will go there and repeat the same
trajectory.
In version 1 we plan to use shortcuts: There must be a pose from the way
there (if not you are already at the start), so pick the nearest/oldest one
within given radius (say 2 meters). The odometry corrected from IMU should be
good enough (must be for the basic mapping of the artifacts) so it could help
the robot navigate back. Moreover we may use VFH (Vector Field Histogram) for
navigation to avoid potential shift and the old poses would define direction
how to return HOME with the shortest path, right?
Do you like it? Do you see some weak point? Well, do not worry, we will share
it with you as we „hit the wall” …
p.s. note, that this strategy can be used for both Virtual as System Track
17th February 2019 — XP Mission 2 completed
OK, we moved a bit in the Virtual Track — two artifact detected and
successfully reported to Base Station:
0 0 starting 15 991000000 scoring_started 477 328000000 new_artifact_reported 477 328000000 modified_score 1 477 328000000 new_total_score 1 684 329000000 new_artifact_reported 684 329000000 modified_score 1 684 329000000 new_total_score 2
As usual it was not that straightforward. The run was based on two X2
robots (X2L and X2R), where the left one reached "fire extinguisher" as
before while the right one should see "the valve" (and later a backpack). We
switched to full image resolution (1280x960) so the image was 16 times larger
than for low resolution (320x240). Originally was the valve detected by
accident — the wheel is red but it is relatively small — so we converted it
into a feature, but … it was incorrectly positioned (approximately by 9
meters). The valve was on the opposite side of the tunnel and the red part was
visible only in some narrow angle. The simplest solution was to skip this
artifact and continue to the red backpack to get the second point.
Note, that the scoring scheme changed recently, so now 2 points are more then
before 4 points:

… and Jirka is right, that it may look like regression . The game engine
was using scale factor for precision and reported time, so 4 points are
actually 1 artifact but with higher precision and in shorter time.
Week 5
23rd February 2019 — The Valve and Backtracking
Again at least some news from the virtual world (there are also some
updates in the system track but they are not very exciting yet and there
should be some summary tomorrow??).
The mission for this week was to properly detect position of the valve (last
week it was off by several meters) and score 3 points. Later on we changed the
sub-goal to still report the very first approached artifact (left —
extinguisher, right — valve) and get slightly better score for faster
return to the start. Moreover we implemented „shortcuts” on the way back, so
the robot no longer follows the other wall after 180 degrees turn but uses
pruned trajectory to the base station area. It helps with the score time by
20 seconds only, but it is still an improvement.
Original score with the valve detection:
0 0 starting 15 842000000 scoring_started 445 243000000 new_artifact_reported 445 243000000 modified_score 1 445 243000000 new_total_score 1 476 238000000 new_artifact_reported 476 238000000 modified_score 1 476 238000000 new_total_score 2
Optimized return with backtracking:
0 0 starting 15 996000000 scoring_started 435 375000000 new_artifact_reported 435 375000000 modified_score 1 435 375000000 new_total_score 1 455 372000000 new_artifact_reported 455 372000000 modified_score 1 455 372000000 new_total_score 2
Also new approach for artifact localization is used — it combines LIDAR data
with the camera. The image is used for recognition that we are approaching an
artifact of some type and LIDAR scan is used to determine precise angle and
distance relative to the robot. All three classified artifacts (fire
extinguisher, backpack and valve) are high enough to be visible also on the
scan. The precise calibration is omitted at the moment (camera field of view is
60 degrees but we are ignoring the fact that it is pointing down) and +/-5
degrees tolerance is used to find the nearest obstacle.

Note, that this method is dependent on the artifact type — as already
observed nor electric box neither a phone is visible by horizontal LIDAR.
- Video from X2L, detecting fire extinguisher, seeing X2R returning home
- Video from X2R, detecting the valve
25th February 2019 — Three Artifacts and Eduro/Robík Status
I wish the real robot's world would be as simple as the simulated one.
Together with Jirka we pushed it a bit further version 2 for virtual
track and let the robots continue until timeout occurs. While the
right-following-robot visits the valve, the backpack and sees white
electrical box (not classified yet) from distance, the left-following-robot
ends up near the fire extinguisher and fails to enter narrow passage. After the
timeout it returns to the old path.
0 0 starting 15 797000000 scoring_started 582 173000000 new_artifact_reported 582 173000000 modified_score 1 582 173000000 new_total_score 1 760 177000000 new_artifact_reported 760 177000000 modified_score 1 760 177000000 new_total_score 2 760 177000000 new_artifact_reported 760 177000000 modified_score 1 760 177000000 new_total_score 3 $ less examples/subt/call_base_x2l.txt TYPE_EXTINGUISHER 155.89 141.26 -14.83 $ less examples/subt/call_base_x2r.txt TYPE_VALVE 239.55 -57.94 -14.91 TYPE_BACKPACK 339.50 -21.94 -19.87
Note, that the positions are relative to initial robot positions which is -x
2 -y 1 -z 0.2 for the left robot and -x 2 -y -1 -z 0.2 for the right one.
So that was easy virtual world where you do not have to leave the comfort of
living room and can watch simulation as TV.

Now the System Track. There has been some progress on both robots Eduro and
Robík. The main pushing force is scheduled whole day testing in the tunnel
Josef for Feb 28th.
Eduro is stripped down to minimal construction, but it still does not fit into
transportation box for travel to Colorado. IMU is mounted on the top of the
robot, so now we should get some reasonable results. If I ignore issues with
power-up sequence then the second biggest issue is with TiM 571 LIDAR. It works
fine but on the edge of obstacles it generates many false reflections causing
even wall following algorithm to panic (obstacle is too close, what should I
do?!).

Another relict was amout of data fro IP camera. We use high resolution camera
and to limit the size of the logfiles we set config parameter sleep … and
it did not help:
python -m osgar.logger –stat e:\eduro\190224\myapp-190224_175122.log 0 sys 5374 | 21 | 0.3Hz 1 app.desired_speed 112 | 32 | 0.4Hz 2 eduro.can 11480 | 1435 | 18.7Hz 3 eduro.encoders 9866 | 1434 | 18.6Hz 4 eduro.emergency_stop 0 | 0 | 0.0Hz 5 eduro.pose2d 12250 | 1434 | 18.6Hz 6 eduro.buttons 26 | 1 | 0.0Hz 7 can.can 95832 | 11395 | 148.1Hz 8 can.raw 11516 | 1441 | 18.7Hz 9 serial.raw 82465 | 2647 | 34.4Hz 10 lidar.raw 12274 | 646 | 8.4Hz 11 lidar.scan 1426248 | 645 | 8.4Hz 12 lidar_tcp.raw 2317317 | 2581 | 33.5Hz 13 slope_lidar.raw 12540 | 660 | 8.6Hz 14 slope_lidar.scan 453779 | 659 | 8.6Hz 15 slope_lidar_tcp.raw 1300052 | 1389 | 18.1Hz 16 camera.raw 185714842 | 1079 | 14.0Hz 17 imu.orientation 347136 | 3072 | 39.9Hz 18 imu.rot 28358 | 3072 | 39.9Hz 19 imu_serial.raw 386786 | 5910 | 76.8Hz Total time 0:01:16.930032
It is patched now, but not tested yet.
Regarding robot Robík we had 2 hours telco with Blansko/ND Team and hopefully
we sorted most of the critical issues for OSGAR cortextpilot driver. So
robot was running calibration figure 8 and more results we should see
tonight.
Week 6
28th February 2019 — Czech STIX
Today we (Robotika.cz team) tested together with CRAS
(Center for Robotics and Autonomous
Systems) team at tunnel Josef. It was real STIX (integration exercise) when
we ported and tested code from Eduro and Virtual Track to robot
Robík.
At the end we executed the scenario when both robots run osgar.explore code
and the only difference was that Robík followed the left wall, while
Eduro followed the right one. Yes, it ended in the hole of mine railroad
switch, but we still consider it as success.
The primary goal, beside integration, was data collection and this particular
log with odometry, IMU, horizontal and slope LIDARs and camera are available
here:
wall-190228_140910.log.


3rd March 2019 — The Electrical Box = Graveyard of Robots
Today we were „relaxing” again with Virtual Track (yes, I know that the
flight to Denver/Colorado is exactly in one month today). The goal for this
sprint is to collect 4th artifact and the proposal was to locate the electrical
box at the far end of the tunnel (x=400m). And, as usual, it was not as trivial
as it may look like:
- the box is invisible for LIDAR (too low)
- the white color is everywhere due to strong robot light
- the box is blocking the road
And the result? Graveyard of robots (Jirka's copyright):

Now there is a detector of collision (as backup solution), verification
of simulation time (in 10 minutes the robots should return home) and besides
RED objects we are now looking also for rectangular WHITE objects.


Week 7
10th March 2019 — The Toolbox, narrow passage, 7 artifacts and Eduro upgrade
There are some good news both from Virtual and Real World. After detection
of toolbox, collision detection with the electrical box, and setting
exploration time to maximum we were able to collect 5 points (5 artifacts).


Then new local planner helped a lot to guide the robots also through narrow
passage (actually passages, there are at least two in the qualification world)
and suddenly we reached 7 points (there is another backpack and toolbox
behind the narrow passage). Now all submissions are in pending state … 8
points is the limit for qualification, so almost there. See the videos of
both robots:
Left X2 robot
Right X2 robot
Eduro pictures


Week 8
14th March 2019 — The Radio, 8 points, "sRA SCdevicestate 2" and subt-artf repository
There couple of small news, some are good some are bad …

I would start with the Virtual Track where we have good news. We have
extend our detector and classificator and now we can report TYPE_RADIO. See
the picture. If you overlook it, it is the small yellow blob on the right
side. Yes, and from the other side it is brown. But it is
blinking, so maybe alternative would be to turn lights off and wait …
The navigation strategy remained the same as in the previous week. It is
sufficient and after proper detection, positioning and also classification of
mobile phone we could get 11 points. Nevertheless 8 points should be enough for
qualification into Virtual Track competition, so now we are converting the
data, and it takes some tome before they are approved on
app.ignitionrobotics.org
DARPA SubT portal.
0 0 starting 14 872000000 scoring_started 805 207000000 new_artifact_reported 805 207000000 modified_score 1 805 207000000 new_total_score 1 805 207000000 new_artifact_reported 805 207000000 modified_score 1 805 207000000 new_total_score 2 805 207000000 new_artifact_reported 805 207000000 modified_score 1 805 207000000 new_total_score 3 805 207000000 new_artifact_reported 805 207000000 modified_score 1 805 207000000 new_total_score 4 1094 191000000 new_artifact_reported 1094 191000000 modified_score 1 1094 191000000 new_total_score 5 1094 191000000 new_artifact_reported 1094 191000000 modified_score 1 1094 191000000 new_total_score 6 1094 191000000 new_artifact_reported 1094 191000000 modified_score 1 1094 191000000 new_total_score 7 1094 191000000 new_artifact_reported 1094 191000000 modified_score 1 1094 191000000 new_total_score 8 1094 191000000 new_artifact_reported 1094 191000000 modified_score 0 1094 191000000 new_total_score 8
So that was the good news, and now the bad news …
0:00:00.047178 12 b'\x02sRA SCdevicestate 2\x03'
If you are not expert on SICK lidars (we are not), you may not see it as bad
news. Shortly this is failure report: Device failure - please check
operations environment and since Monday we have no scan data from the
horizontal SICK sensor:
b'\x02sRA LMDscandata 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0\x03' b'\x02sRA LMDscandata 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0\x03' b'\x02sRA LMDscandata 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0\x03'
Our impression is that even the motor in the sensor is not turning, so now we
are in discussion with SICK support what can be done in the remaining short
time before STIX.
The last news is related to new
robotika subt-artf repository, which
contains some pictures of discovered artifacts in the virtual qualification
world:
These pictures are taken with X2 robots with configuration #4, i.e. high
resolution camera.
Week 9
20th March 2019 — Back on Track + reprocessing
Thanks to great support of SICK company we are now back on track with
replacement sensor TIM551!
The first tests were not as smooth as one would expect, but the problem was no
longer related to the sensor. For some unknown reason CAN terminal was missing
(yes, it worked before and it should be inside the electronics box) and Eduro
behaved very strangely — from approximately 10 modules it has seen only one,
and after restart and checking the cables it was different one. Quite a
nightmare two weeks before we fly to Colorado …
After addition of new CAN bus terminal everything worked fine as before.
In mean time we tested reprocessing of old logfiles with a "new" code — it is
not really that new, because it was already used in Virtual Track but not
tried on real machines yet. It is related to fusion of position computation,
when IMU yaw defines the heading and it looked quite promising:


These are relatively long corridors at the university (the scale is hardly
visible in the bottom left corner). I was told that near the loop end is
machinery generating strong magnetic field and that is probably the reason
while it failed closing the loop.
21th March 2019 — Virtual Track — Leader Board!
I just discovered that our logs from Virtual World were just reviewed!
Moreover there is also LEADER BOARD and it looks the way ROBOTIKA TEAM
would like it:

p.s. I made another mistake regarding dead-lines: April 22, 2019 is not
beginning of the Virtual Track competition but Qualification Deadline!
… so I am glad we already have 8 points a month in advance.
Week 10
29th March 2019 — No news good news?
There are only 5 days remaining to takeoff to Denver and it may look like there
is nothing going on. It is actually not the opposite, but the tasks are not
necessarily technical, except issues like Eduro charger, which is on 230V
only, so we will have to prepare alternative.
Example of difficult question is what to wear and take with us. It is
possible to check directly
web
cams, 7 degrees of Celsius, snow:

There are some code bits like reporting artifacts (see
SubT STIX - add tool for manual
artifact report pull request … it was tested with DARPA django server, but
some updates are received today: The competition scoring server will accept
keyword strings as in the section headers of the Artifacts Specification STIX
Event document (i.e., capitalized words with spaces as necessary). See below
for the set of competition artifact type strings: ["Survivor", "Cell Phone",
"Backpack", "Drill", "Fire Extinguisher"]
Another chapter is presentation of the team. Last Monday there was a call with
organizers, and were informed there will be their media crew and it is
necessary to get ready for theirs questions etc.
Eduro and Robík already went through packed state (both robots will be in
normal travel suitcases) but we should check at least one more unpack/pack
cycle before leaving to DEN.
30th March 2019 — Robotika is becoming International!
As preparation for DARPA media call we were asked to provide twitter and
instagram links. This was also the last moment we had to decide how we will
present our Robotika.cz Team during whole SubT Challenge. There are two
main points which were not obvious when you mention https://robotika.cz
website:
- we are not only Czech (CZ) team
- we are also involved in commercial activities and we hope that SubT will help us to reinforce this direction
So we decide to go International! — Robotika
International (the web is currently mirror image of Robotika.cz but it will
change during this last week). There are also new
twitter and
instagram pages available.
 Robotika Internationa - SubT banner |
At the moment Robotika International includes Czech, Swiss and U.S.
sub-teams.
p.s. we have a new Swiss member — Bella welcome on board!
3rd April 2019 — Time to pack for STIX
There is only less then 10 hours left to take-off and our journey to
Colorado mountain mines can begin. I am actually looking forward to rest on
the plane right now …
I will only mention some bits piled in e-mails …
1) There is a new website subtchallenge.world
for Virtual Track and Leader Board is publicly available there.
Nate also mentioned in
issue
#58: The leaderboard is also live, and shows that "robotika" has 8 points,
which is enough to pass qualifications. … so I guess we are officially
qualified!
2) I did not give enough room for Robík, so here are at least some pictures
from testing in Štola Josef:



3) Eduro is packed in standard bag … 77cm x 47cm x 27cm

4) There is a new revision of
SubT_Challenge_Competition_Rules_Tunnel_Circuit.pdf
(Revision 2, March 25, 2019) and it includes detail specification of Star(t)
Gate (tunnel entrance)
 Starting gate and reference frame dimensions |
5) The schedule for Robotika.cz Team is already given:

6) We do not have any team photo yet … so let's at least publish again one
from Štola Josef:
 Martin,
Pavel, Zbyněk, Eduro and Robík")
Wish us good luck and hopefully next news will be from
Idaho Spings, Colorado,
USA.
4th April 2019 — Idaho Springs, CO, USA
We are now in Idaho Springs and what is even more important the robots are
with us! Yes, I am not joking — I just exchanged a mail with CRES team and
they got here on Tuesday, but their robots were for two days delayed and
delivered to wrong address! So we are lucky on this part, for sure.
Eduro already made some exploration of our new home:



Corresponding testing logfiles are here:
Here are also some pictures from the journey:



Unfortunately, as I was taking the picture of American flag my camera displayed
Error E18: The E18 error is an
error message on Canon digital cameras. The E18 error occurs when anything
prevents the zoom lens from properly extending or retracting. The error has
become notorious in the Canon user community as it can completely disable the
camera, requiring expensive repairs. … so that is the only current dark
side. :-(
Now is time to charge Robík LiPol batteries (they had to be discharged for the
trip), fix resets on Eduro (we confirmed some lags up to 20ms causing it) and
maybe some small hike to the mountain across the road …
p.s. you can have a look at nice article about
SubT
on Spectrum IEEE with link to video
Demonstrations of
DARPA's Ground X-Vehicle Technologies
6th April 2019 — SubT traps, OSGAR slots, Robík API, delayed video processing …
Yesterday was quite busy. The ever-growing TODO list contained some major
points which had to be addressed with high priority. So while we are staying in
rented house in Idaho Springs we can exercise and test some basic
functionality on the terrace.
 Our base in Idaho Springs |
The spacious house has nice deck and sure enough our robots Eduro and Robík
behaved differently despite having the same code and strategy. While Eduro was
reasonably following the allowed playground in 1 meter distance from the
border, Robík got stuck at the house corner!? Curious?
The reason is design flaw of simple exploration algorithm we used back in
Virtual Track in December 2018. The navigation uses only left side of the
scan to follow the wall, but it uses front sector for speed controller. It is
not only necessary to explore the tunnel circuits but also to do it fast, so
at least in Virtual Track the robots are moving at their maximal feasible
speed. Do you see the „stupid” problem? The robot was perfectly aligned with
the straight left wall and the gap is exactly 1 meter, which was also the input
parameter desired distance from the wall. So the algorithm navigated the
robot straight while the speed controller stopped because of the house
corner.

And why Eduro was not caught in this trap? Eduro SICK lidar is at 30cm from
the ground while Robík has it slightly higher, at 38cm. The wall is not
perpendicular but it is tilted outside … in other words the gap sensed by
Eduro is slightly narrower then for Robík! Finally Robík navigates on
straight line quite steady and Eduro twists a little … but we could reproduce
the problem with 90cm desired distance on Eduro too. Fixed — both
algorithms have to share the same front sector space.
There was another detail related to this issue, which is Robík API. The
robot drives forward without any problem, but the interpretation of reverse
motion was different. The author PavelS gained know how from other outdoor
robot competitions, and he found out that it is much better to turn his robot
on a circle than on the spot. So the direction is not angular speed but
rather circle on which the robot should move. This bug/misinterpretation
had also negative influence in the situation mentioned above, when for very
close object in front the robot leads to backup. Fixed — just high level
cortexpilot diver swapping direction for reverse motion.
The biggest issue with Eduro were motor resets due to watchdog timeouts. They
are set tight from times when Eduro was a small robot capable of speed up to
4m/s (I think that we never reached that speed because it needed a lot of test
space). After discussions we decided to implement something similar to
Qt slots, so module which
parses data from CAN bridge, transfers them to CAN messages (and monitores also
the health of all CAN modules), then Eduro specific driver and then back to the
CAN bridge. With the OSGAR slots which is all done in one raw without any
internal communication overhead. Fixed.
The next issue on the list is delayed processing of recorded video. It serves
two purposes:
- post-processing analysis by human and/or powerful computer(s) at the Base Station
- simple automatic artifact detection on board as a trigger for the early return and fast report of the very first artifact
So while for the post-processing you need complete video record, if possible,
for real-time you just need something what is robot currently capable to
compute.
Yes, we are going to be busy again. BTW the first group is already
testing at Edgar's Mine today … so I am happy, at the end, that we are the
2nd group starting on Monday 8th April 2019.
p.s. Jirka send us link to IEEE Spectum article
DARPA
Subterranean Challenge: Meet the First 9 Teams from yesterday
p.s.2 we still save some time to hike a little in the nearby mountains (Idaho
Springs has elevation 2410m above the see and this (sub)team picture is from
3400m)

8th April 2019 — First points, first bruises …
Today was the first day of STIX testing in Edgar's Mine, tunnels Miami and
Army. Our first stop was Miami, nice, straight tunnel with lights … in other
words beautiful … yes, except the railway in the middle.
In the morning we discussed the final strategy regarding sequence of
deployed robots, desired distance to the wall, side selection, return on
detected artifact, expected log download and processing … so we end up with
conclusion that all we can reasonably do, is to define one timeout for
robot return and completely ignore automatic artifact detection.

The first victim (deployed robot) was Eduro, 4 minutes timeout for return HOME
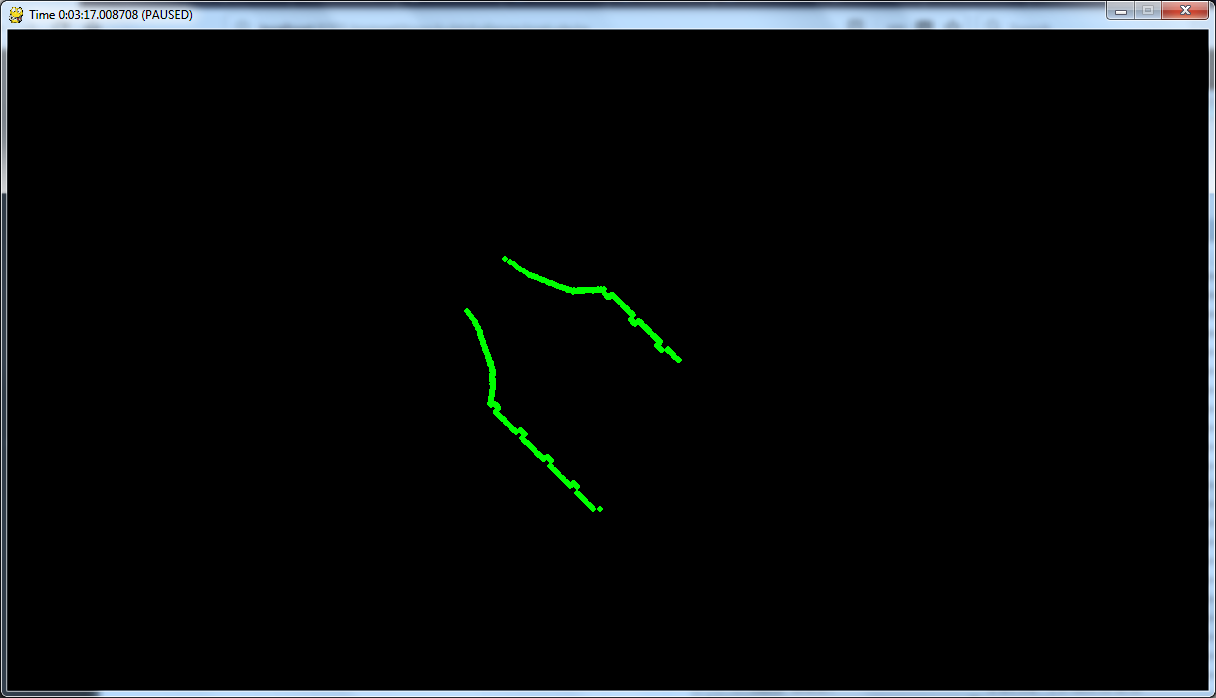
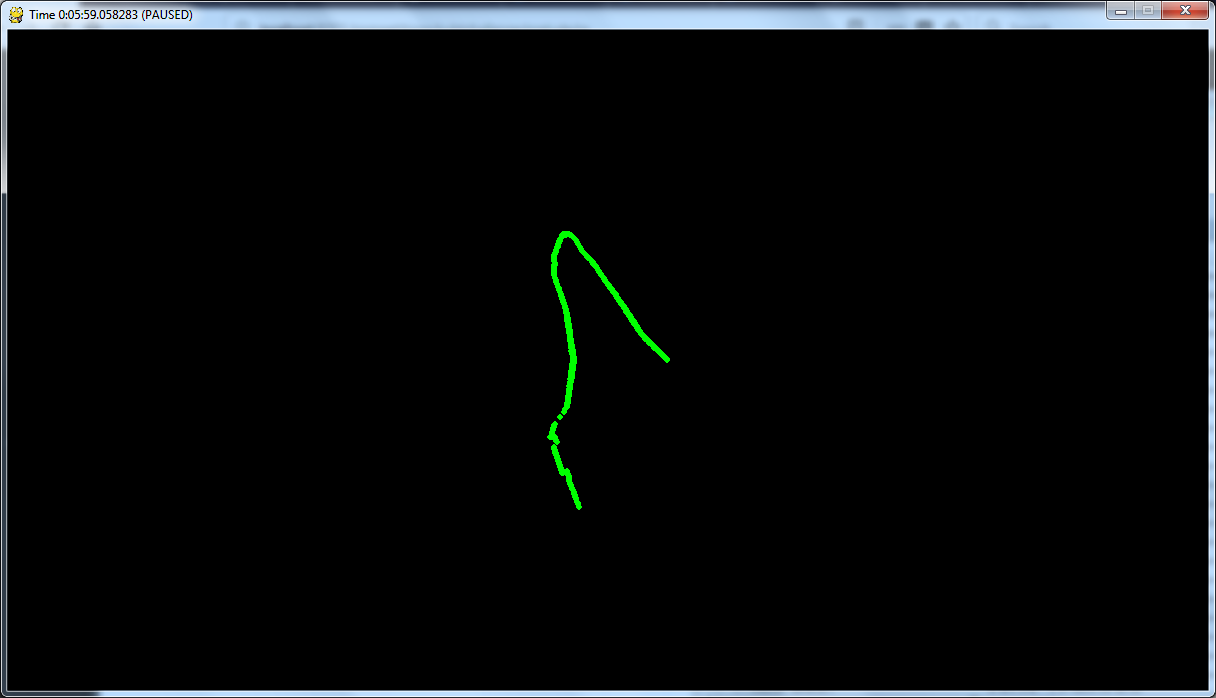
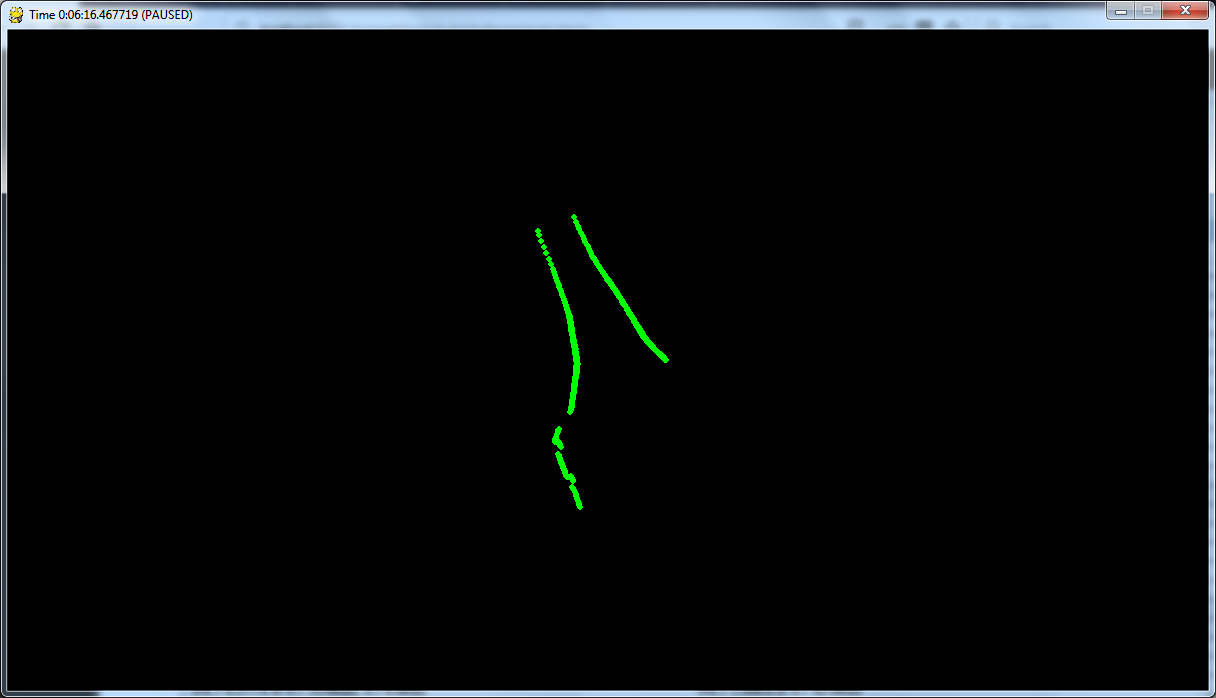
and 60cm from the wall. The robot did not return.
The second test was robot Robík, 4 minutes timeout, 60cm, left wall. Game
changer!

|

|

|
There are not many people who would appreciate these impressionistic images,
but I really did. Yes, the first great news was that Robík actually managed
to return and already picked our first artifact! Mission completed, we can go
home now, right?
M:\git\osgar\examples\subt>python report_artf.py Backpack 43.276 0 0
Get Status
b'{"run_clock":0.003218,"score":0,"remaining_reports":"70","current_team":"robotika"}'
Report {'x': 43.276, 'y': 0.0, 'z': 0.0, 'type': 'Backpack'}
b'{"run":"0.1.1 (Team Robotika: STIX Miami Practice Scenario)","url":"http://loc
alhost:8000/api/reports/2/","run_clock":0.0,"submitted_datetime":"2019-04-08T18:
55:38.102984+00:00","score_change":0,"report_status":"run not started","team":"r
obotika","y":0.0,"x":43.276,"z":0.0,"type":"Backpack","id":2}'
Get Status
b'{"run_clock":0.000916,"score":0,"remaining_reports":"70","current_team":"robotika"}'
Well, as you can see we did not get the point … but it turned out that the
server was not in the „competition mode” and we got confirmation that
position of our first artifact is correct.
Then my memories become a bit fuzzy, I should keep log of all parameter which
we changed over 5 hours total in both tunnels. There was a nice Fire
Extinguisher at around 125m from the gate, but we did not report the position
precisely enough. As we analyzed the log files there was another Fire
Extinguisher much closer and that worked even on the server:
M:\git\osgar\examples\subt>python report_artf.py "Fire Extinguisher" 64.757 -2 0
Get Status
b'{"run_clock":1374.175583,"score":0,"remaining_reports":"69","current_team":"robotika"}'
Report {'x': 64.757, 'y': -2.0, 'z': 0.0, 'type': 'Fire Extinguisher'}
b'{"run":"0.1.1 (Team Robotika: STIX Miami Practice Scenario)","url":"http://loc
alhost:8000/api/reports/4/","run_clock":1374.188928,"submitted_datetime":"2019-0
4-08T19:27:41.959721+00:00","score_change":1,"report_status":"scored","team":"ro
botika","y":-2.0,"x":64.757,"z":0.0,"type":"Fire Extinguisher","id":4}'
Get Status
b'{"run_clock":1374.340545,"score":1,"remaining_reports":"68","current_team":"robotika"}'
Well, yes, you have to be a bit crazy to get excited by this JSON output, but
note "score_change":1
Robík returned several times while Eduro never, unfortunately. On the other
hand Eduro had much nicer videos (better light and camera).
Later we moved to Army tunnel — what a change! Dirty, dark, curved tunnel
already at the entrance. The robots were trapped in various mess-objects …
sigh. Twice was Robík returned by „rescue party” in pieces … once one wheel
was loose and the fix was easy. The last was really bad, when the robot
(according to recorded video) was up-side-down for 15 minutes crying in the
tunnel, but we did not hear it … well, hopefully PavelS will fix the tower
for tomorrow competition run.
Videos




… to be contined
p.s. Sometimes it is better not to know what the kids are doing when they leave
the home, but … I made a collection of „death pictures” i.e. the last
moments when was the robot Eduro stuck. There was one particular, which really
scared me! BTW I also found one artefact in Army tunnel …










Also note, that all logfiles are uploaded to:
- http://osgar.robotika.cz/subt/robik/miami/
- http://osgar.robotika.cz/subt/eduro/miami/
- http://osgar.robotika.cz/subt/robik/army/
- http://osgar.robotika.cz/subt/eduro/army/
p.s.2 sometimes I feel really stupid … why I did not even check the detected
artifacts from the robot?! Sometimes they are smarter, and do not get tired
easily as humans …

10th April 2019 — Mission Impossible Completed!
The SubT Challenge STIX for Group 2 is over now. I would consider it as a big
success for Robotika Team as we reached our minimalistic goal with
currently available hardware platforms. Both robots were used in the simulated
run and both autonomously scored! Life is good (R) … and now some
details …
The main task for the competition like day was to choose strategy and maybe
to improve our tools. We did not change the code for robots as there was not
enough time for any reasonable testing. If you would like to see the dirty code you
can have a look at
OSGAR
with tag SUBT_CHALLENGE_STIX_2019 with the commits from the last two days:
1de7305 lidarview.py - accept user rotation via –rotate in degrees efdd16c lidarview.py - temporarily increase window size for easier analysis 60590d0 lidarview.py - use max image size for VGA (Robik, 640x480) 3bb2f93 log2video.py - fix timestamp display for Robik camera (640x480) c8a8cdd subt.py - add move 2.5m straight 997891d eduro-subt-estop.json - FIXUP missing pose3d b422528 estop integration for robik. 24ec9a9 estop.py - shutdown on EStop 6c1f70d Add eduro-subt-estop.json configuration 5a125c8 estop.py - first implementation with publish emergency_stop feb41b2 Add estop.py test for SubT STIX
As one of the few teams we integrated DAPRA E-Stop device, which we got on
Sunday night and on Monday morning it was already integrated. Usually I would
refuse to do any modification at this stage, but STIX is also exercise for the
organizers so we did it as a forthcoming gesture. The E-Stop specification is
already publicly available (see
Transponder_and_Emergency_Stop_Integration_Guide.pdf)
and with a single switch DARPA can kill all robots at once. This is also
mandatory for the real competition so we are glad we already pass.
The second code modification on Monday (the testing day) was adding line:
self.go_straight(2.5) # go to the tunnel entrance
to the subt.py code. There are several markers available in front of the
gate helping to define DARPA global coordinate system. We decided to pick the
one at 2.5 meters so we see the gate on cameras before the robot enters the
mine.
And finally changes for lidarview.py to increase the displayed camera image
(up to now it was used only for a reference what was happening, but now it
was the only source for artifacts detection), increase the size of window to
see more) and finally some tweaks to display time in seconds in collected Robík
video stream (low VGA resolution). And that is it.
Back to the yesterday simulated run. There is an hour to map as many
artifacts in the tunnels as in the real competition scheduled for August 2019.
As it was still the test we were allowed to restart once, but the time
restriction applied.
After the first day we decided to use Robík as the primary robot and Eduro as
backup when Robík fails to fulfill its mission. The first exploration was with
the same parameters as on Monday, when we scored the very first point: 0.6
meters from the left wall, slow speed 0.3m/s, return in 4 minutes. And Robík
performed very well — see video. It is worth
pointing out, that compass did not work very well at the Miami tunnel
entrance:

Here the robot followed the straight! wall. Team CRAS confirmed that they
would destroy their drones if they would keep the compass enabled. Off topic
the
GPS
week overflow caused some troubles to GPS devices used in SubT (not ours,
again story from CRAS team). The software required some update, but GPS was
not even physically mounted(?)) … I will try to get more details later on
this subject (the 10bits counter reached week 1023 on 6 April 2019).
(hmm, I have incomplete log on my notebook now --- yesterday we changed
strategy and started to download log file as soon as the robot was available on
WiFi, and then we focused on restarting Robík for the second tunnel exploration
instead of downloading complete log ... maybe later we will also publish
content of the 'black boxes')
Log file was (partially) downloaded and robot restarted for the next mission.
This time we picked faster speed (0.5m/s), slightly further distance from the
wall (0.7m) and longer exploration time (9 minutes). Yes, here we used
experience from Monday as 10 minutes was enough to reach the complex crossing
with some deadly caves, so we did not want to risk it yet. Never the less Robík
was lost and finished moving in circles on the way.

Note April tags deeper in the tunnel — they are very useful for definition of
the DARPA coordinate system as the robot reaches them in approximately 25
meters and can update its measurements.
Robík was out of WiFi reach (we really did not worry about connection much, as
the primary goal was to autonomously return to the Base Station), so we sent
Eduro robot: 0.75m from the left wall, 0.5m/s, 4 minutes timeout … i.e. if
everything goes well, we should reach further point then Robík at the first
run. We were lucky and Eduro discovered "Backpack" artifact before it got stuck
on the rails (video).

Luckily enough Eduro was still on the network so we could download
the logfile and report our second artifact:

This was the end for the first run. We still had almost 30 minutes left so
tried more dangerous exploration on the right side but the score did not
change (details and logfiles will be published later).
!! TWO POINTS FOR ROBOTIKA !!
p.s. our vacation starts today and I can already hear the rain …


18th April 2019 — There and back again
The journey back was not as smooth as we hoped. The problems already started at
the Denver airport. The Lufthansa rules were different there: while in Prague
we could check-in baggage as a group and each bag could be up to 32kg as long as
the sum was less then 4 * 23kg, in Denver all the bags had to fit in 23kg
limit. :-( So we repacked our robots at the airport, removed laser from Robík
and protective staffing from Eduro.
The next surprise was at Frankfurt airport. Li-on batteries have limit 100Ah
per person and they have to be in carry on luggage (so in the case of a fire it
can be detected and handled by passengers). It is prohibited to check it as
baggage. There was another security check at Frankfurt (as far as I remember
there was none on the way to U.S. — we simply transferred from one gate to
another). And German security police refused battery pack on board :-(, that
it has to be checked in. Yes, it looks like a pack of explosives, but … it is
not allowed to be checked in. And we had less than 1 hour for transfer so after
back and forth runs and arguments PavelS left his bag with four batteries at
check-in counter. This way we throw away 10 000 CZK (approx. $500)! We could
stay at hotel for a week fot that price … sigh.
So the only workaround is direct flight or send it as a cargo or to use
different types of batteries.
p.s. we received mail from DARPA regarding qualification for August Tunnel
Circuit: We hoped you all made it back safely form Colorado last week. We
wanted to follow up and let you know no additional Qualifications materials are
required for the Tunnel Circuit, as your STIX participation has qualified you
for participation.
We will still require a demonstration of integration with the Tier 2
Emergency Stop and Transponder, with a deadline of July 1st. In addition
any/all new platforms you anticipate using at Tunnel Circuit must also need to
be qualified by July 1st.
24th April 2019 — The STIX Teams
There were 9 teams testing their robots at STIX in Colorado, 7 sponsored by
DARPA and 2 Czech teams training for the circuit tunnel competition in August.
Unfortunately there was not enough space for information exchange as each team
had own time slot and assigned tunnel (Miami or Army). At the moment there are
at least team pictures available on DARPA
twitter:
Group 1



Group 2



Group 3



I asked the teams following questions:
- number and type of deployed robots?
- autonomous or teleoperated or combination?
- score for simulated run? (I suppose that all teams were in Miami tunnel at the end?)
- maximal distance reached from the base station?
- number of people at STIX event? (although I could count it on the team picture on DARPA twitter)
And here is the summary (the table will be updated as soon as I receive
answers):
| Team | Deployed Robots | Navigation | Score | Distance | Num People |
|---|---|---|---|---|---|
| CERBERUS | |||||
| CoSTAR | 25 | ||||
| CRETISE | |||||
| CSIRO Data61 | |||||
| CTU-CRAS | 2x TRADR UGV + 1x hexacopter | combination | 4 | 150m | 12 |
| Explorer | |||||
| PLUTO | |||||
| MARBLE | |||||
| Robotika.cz | 4W Robík, tricycle Eduro | autonomous | 2 | Eduro 68m, Robík 221m | 5 |
3rd May 2019 — DARPA STIX Video
The original DARPA article about STIX results is here:
https://www.darpa.mil/news-events/2019-04-29.
11th May 2019 — DARPA STIX Robotika.cz pictures
")
")
")
")
")
{kind=link}
{kind=link}
20th May 2019 — CERBEROS and CRAS videos from Colorado
There are couple videos from STIX in Edgar's Mine in Colorado available at
YouTube:
CERBEROS
- ANYmal at DARPA SubT STIX — ANYmal, a quadrupedal robot developed by RSL (ETH Zurich) and ANYbotics, is deployed in the dark and dirty corridors of Edgar Experimental Mine in Idaho Springs, Colorado, in preparation for the Circuits Stage of the DARPA Subterranean (SubT) Challenge.
CRAS
- DARPA Subterranean Challenge - ČVUT v Praze, FEL (CZ) — ČVUT v Praze, Fakulta elektrotechnická se účastní americké soutěže DARPA, ve které plní úkol autonomního hledání předmětů a osob v podzemí za pomocí robotů a bezpilotních dronů.
- Czech TV (from 33rd minute)