Introduction of teams
two German and two Slovak teams (and 5 Czech)
Welcome new team KaMaRo Engineering (known from Field Robot Event), new machines (ARBot, JECC) and all stayers . When and where you could see the robots? 5th September 2015, Písek city center, Czech Republic. Concurent starts of all robots at 10am, 11am, 2pm and 3pm.
Teams
YouTube playlist of all registrations
AmBot (CZ)

|
youtube https://youtu.be/y_J8i0tHYjw
Robot Ferda is based on modified children's electric car ("ride-on") for Robotour 2015.
The controller is based on Arduino with ATmega2560, controls
the motors, utilizes magnetometer as a compass, manages three sonars to detect
obstacles, reads data from an external GPS receiver and communicates with a
Bluetooth converter (to respond to commands from the master system). This
master system is an Android smartphone with proprietary application (RoboNav)
for GPS navigation by the map (derived from OpenStreetMap) supplemented by
visual navigation according to smartphone camera (for keeping on the road).
ARBot (CZ)

|
youtube https://youtu.be/DsKR7kcO96o
Robot is controlled via Zedboard with SoC Zynq 7020 manufactured by Xilinx.
It has 512 MB RAM, 32 GB SD, the heart is dual-core ARM Cortex A9 +
NEON at 600 MHz and it contains programmable gate array with 85 thousands units.
Zedboard runs on Linux and as main programming language is used mono and C#.
The chassis is differentially driven with 3rd passive wheel. The modeller
wheels have diameter 17 cm and two motors PG36555126000-50.9K with encoders are
controlled by professional unit SDC2160 by Roboteq and it provides necessary
traction.
There are two optical odometers ADNS 3080 for further position improvements.
The next sense is „touch”. Robot has two tactile FSR sensors integrated in
the front bumper.
Time-tested AHRS VN-100 from VectorNav provides information about robot orientation.
The global position information is handled by GPS uBlox NEO 7M.
Robot has two sonars HC-SR04, which can be rotated via model servo motor.
The control unit for model servos is SSC-32.
Robot has stereoscopy camera with chips Aptina MT9V032, which have global
shutter and are able to work in HDR mode. Camera is movable in two axis via
servos.
The energy source are 4 LiFePo cells with capacity 14.5 Ah and protected by
SBM.
The chassis is built from 2mm thick plywood for air models and spruce beams 7
mm. Simply model domain. All parts were cut by laser.
Istrobotics (SK)

|
youtube https://youtu.be/rTmW52ScBX0
The robot is based on modified RC car TRAXXAS E-MAXX (3903). It is equipped
with camera, GPS, sonar HC-SR04, IMU with 3D compas and magnetic IRC. Arduino
mega is used for robot control and sensors reading. Odroid C1 running on linux
is used for computer vision and GPS reading. Robot is programed with C++ and
OpenCV.
JECC (DE)

|
youtube https://youtu.be/0WH-PPUnL6c
- image recognition with webcam
- obstacle detection with SICK PLS 101
- embedded pc module with Intel Core i7
- DRV8432 motor driver
Kamaro Engineering (DE)
|
Our Robot is completely self developed, from mechanics to software. It
has four wheels, two independently steered axis, one main motor and
weighs about 40kg. It was mainly developed as an agricultural robot for
the Field Robot Event. The low level software is written in C++, the
high level software in C# and Java. It has two LIDARs and a camera as
its main sensors.
MarS

|
Robot is based on 4WD chassis of terrain RC model.
The data from GPS and compass are used for grid localization. The candidate
with the highest probability is selected from the grid. Moreover it has to
overweight all neighbors by given ratio to be accepted.
The algorithm for planning path from current winner position to goal is
standard A*.
The road navigation is based on image processing of front camera. The odometry
and GPS position then estimates the distance to crossing, which is realized by
simple wall-following algorithm with compass direction correction.
NDTeam (CZ)

|
youtube http://youtu.be/2vXgi8JW6GU
Robot Robík:
- weight about 20 kg without barrel
- controlled by homemade control unit based on Cortex M3 (LPC1765)
- 9 DOF AHRS, GPS
- power: 8S1P 5Ah LiPol
- Credit card sized Linux computer Odroid U3 for video processing
- OpenCV for road detection
- 5x sonar for obstacle detection and avoidance
Radioklub Písek (CZ)

|
youtube https://youtu.be/Elczrq4C2Rw
E-liška has size approximately 95x60x48 cm and weights around 40 kg. The board
voltage 24V is provided by two gel-lead accumulators 12V/18Ah. E-liška has
spring-loaded 4-wheels undercarriage with Ackermann steering and powered all
four wheels, each with its own control unit. We replaced two back motors by
BLDC for this year. We use Lidar Sick , GPS and 9 DOF innertial unit. The main
control provides notebook with operating system Linux-Debian, and motor control
handles own module with STM32. The power steering is addressed by own
construction of H-bridges and 3phase control of BLDC motors. The main program
is written in Python.
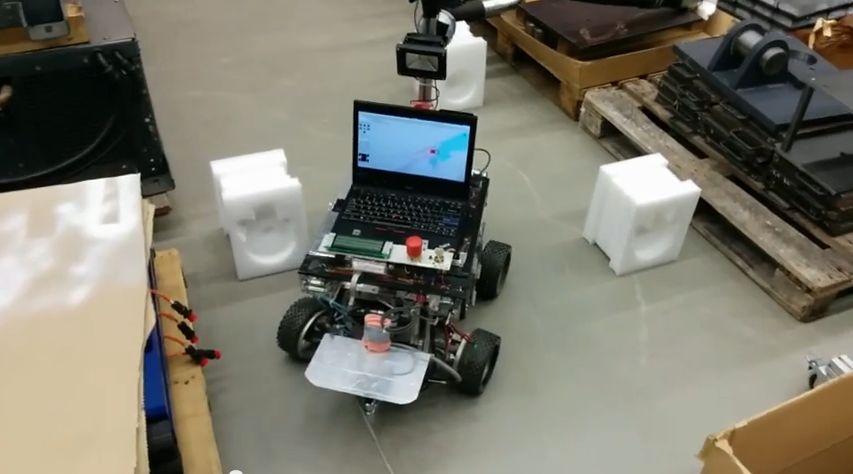
Smely Zajko (SK)

|
youtube http://youtu.be/aixAzwEohaI
Parallax (Motor Mount and Wheel Kit), encoders, 2xHB25 motor drivers
Sbot board (based on AVR ATmega128, low-level control board)
PC ASUS UL30V (main control computer)
5x SRF-08 (ultrasonic sensors)
GPS NaviLock NL-302U USB SiRF III
Compass with tilt compensation (HMC6343)
AVR ATmega8 (compass driver)
Camcorder Panasonic SDR-T50 or webcam
usual usb hub
Power: HAZE HZS 12V 9Ah
handmade wood & aluminium base
red power switch and power circuitry
If you would like to somehow support this contest or you have some
comments/question, please use our standard contact form.