Robotour 2025
castle park Buchlovice
The twentieth year of the outdoor autonomous robot competition will be held 13th-14th September 2025 in Buchlovice Castle Park (re-try after the last year floods). You can go to a beautiful park an entrance fee applies, but it can also be combined with a visit to the castle. The competition is accessible the public. Update: 3/10/2025 — Online Workshop (recording available)
Automatic translation by Google translate
Rules
The rules are the same as last year and can be found on GitHub with the tag ROBOTOUR2023RC1:
czech
and
english.
Location
The competition will take place in the castle park Buchlovice.
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
|












Registration
As in the last years, please send by the end of July 2025 an email to the address webmaster-at-robotika.cz with the subject Robotour 2025 - team name.
If the robot is new, add a more detailed HW/SW description.
Part of the registration is a link to this year's YouTube video with the title ROBOTOUR 2025 REGISTRATION - team name, proving that your robot (still) works. Ride 10m after
path, obstacle detection, Emergency STOP button functionality.
Teams 2025
Pre-registered teams from 2024
- ARBot (CR)
- BeMaTo (CR) — renamed to Helhest
- Istrobotics (SR)
- Sĺňava (SR)
- Smelý Zajko (SR)
- SynthCat Robotics (CR)
Marathon
- ND Team (CR) — registered via Robotour Marathonu (2025-06-07)
New teams
- Artemis (CR)
description
HW: Chassis: Hunter SE by Agilex PC: Asus NUC I5 Cameras: 2x RealSense D435 from Intel Display: 10" WaveShare GPS: Septentrio mosaic-go Wifi: Mikrotik mAP lite Software: OS: Ubuntu 24.04 LTS ROS2 Jazzy NAV2 - Ultimo Minuto (CR+SR)
description
Own construction assembled from the ground up, material mostly iron, skid steering Drive: DC motor, 2×24 V Driver: PWM of an older design, replacement with a more powerful driver is planned Power supply: 2×12 V in series, gel-lead battery Control: PC - laptop with Windows 11, control software in Python Currently only works with a camera, but a small LiDAR will also be connected. The video shows today's first ride outside, so there is still a lot to work on. We hope to have everything done by the competition deadline. - Unidroids (CR)
description
Hardware: Computing unit: NVIDIA Jetson Orin Nano (8GB, JetPack 6.2) Cameras: 2× IMX219 (CSI, 200° FOV) – stereo view down LiDAR: Unitree L2 (Ethernet) GNSS + Dead Reckoning: C102-F9R (USB) Base: Hoverboard with modified firmware, controlled via USB serial line Control: Mobile phone (Android Infinix Smart 8) Data storage: SSD Lexar NM620 2TB (separated for system, logs and projects) Software: Linux (Ubuntu, JetPack 6), services written in Python We use our own architecture with separate socket and HTTP services (FastAPI) Videos, segmentation, obstacle detection and control are implemented as separate processes Development is done remotely from VSCode via USB-C (gadget mode, headless) https://github.com/unidroids/robotour2025
Invitation
The competition will take place on Saturday afternoon (13/9/2025 2-4pm) and Sunday morning (14/9/2025 10-12am), but some teams will probably
test in the castle park on Friday.
The official invitation (PDF) is available for download.

|
https://live.robotour.cz/ with exact start times and QR codes for robots will also be available.
Partners
|
|
Blog (md)
Saturday, September 13, 2025
10:00 — the journey along the D1 was surprisingly smooth (yes, I got up at 4:10, so body forced me to get up, and yet I won't go back to bed when the alarm was set for 4:40), so Tomáš (SynthCat Robotics) and I arrived in Buchlovice around 9 am. That was also the beginning of the park's opening hours, or
there couldn't have been a better timing. The weather is worse — it's pouring like a bucket, which reminds me too much of last year's floods. :-(
Yesterday, 4 teams were supposed to arrive, but apparently none of them showed up at the park — either they didn't arrive, or they have enough problems to solve without the park, or the message got lost somewhere. But
even now (10am) there's no one here except Tomáš. We have a luxurious castle setting … I could imagine a wedding here. And if the weather doesn't improve (the forecast
isn't very positive), we'll be really grateful for a roof over our heads!

I had a quick look around the park and … the competitors often complain that I'm planning all sorts of tricks for them — there's no need, the reality is really "cruel". I have a feeling
that Matty would do it, but Eduro probably wouldn't. Various bridges, drainage channels (they are really needed here), puddles (where there are no channels), roots … just a proper English park … the fact that there is no GPS under the wet trees is just a detail. I know they will stone me anyway, but … I didn't have to complicate anything.
11:00 — ARBot and Istrobotics arrived. Aleš (ARBot) is said to be returning to Prague today, but Istrobotics managed to do one quick ride last night and it is said to be challenging. They mentioned the newly established flowerbed, which is black and the neuron evaluates it as an asphalt road. Otherwise, the rain stopped
and I briefly saw the sun. There is still hope.
added 15/09/2025
12:00 — it was almost time to go for lunch, but at the same time other teams started to appear. Or this would be solved "a little" from an organizational point of view (most likely
by returning to the original competition only on Saturday, but from morning to evening). Ultimo Minuto arrived with their obviously quite heavy machine (two people struggled with it in total). Michal said that he was returning to Robotour after 15 years and if you remember tank from Robotour 2010,
Tatran team, then that's the connection.
Helhest and Artemis also appeared — bigger robots. And slowly, things started to get better. So at least a quick lunch …



13:00 — test pre-round. I accompanied Istrobotics to the loading point and on the way to the unloading … only at one point the robot angrily threw the beer away.
It was a big step at the approach to the bridge and the keg fell out:

I think several teams would have deserved at least a point, but I wasn't at the start and it doesn't count towards the overall results anyway.
14:00 – 1st round
The loading and unloading task was the same as in the test pre-round (motivation why to participate in the optional pre-round). This time I
accompanied a large tricycle Helhest, which zigzagged to the first bridge and reached the loading. After entering the next goal (unloading), but while turning 180 degrees
the robot went off the road. But a very nice (and dramatic) ride.

Istrobotics repeated the ride from the pre-round without any problems, but they also did not get to the unloading. I think they filmed all the rides, so I will add a documentary video if necessary.
ARBot had problems with USB cameras — they would fail at various times, so the robot would sometimes only drive to one camera instead of two. Another problem was with the position on the map and although the robot later navigated nicely along the paths, its routing did not necessarily lead to the goal and therefore only 1 point for leaving the semi-autonomous zone. Tomáš alias
"SynthCat Robotics"" and the guys with "Artemis" were in a similar situation. "Unidroids"" struggled the most at the start, where the robot swerved a lot, simply not going straight, and "Ultimo Minuto""
also always only moved a little. Both teams therefore lost points.
15:30 – 2nd round
By the second round, several teams had started editing the map, or rather prohibiting automatic routing over some bridges. There were 4 bridges in the castle garden and each one had some kind of betrayal.
To be honest, I was a little scared when "Istrobotics"" threw themselves down a narrow path down the hill onto a smaller bridge, but they were not alone, so it was probably the poorest route.
In the second round, Helhest failed to repeat the successful loading, nor did any other team. On the other hand, Ultimo Minuto scored points and "something went wrong"
"SynthCat Robotics"".

Sunday, September 14, 2025 added 15/09/2025
9:00 — it rained in the morning. More precisely, it poured and thundered all night, so much so that it reminded me of last year's floods. Nevertheless, PavelS/ND Team arrived with Saya and after a while
Andy/Sĺňava with a toy car. The bad news was that when PavelS drove the robot from the car to the joystick, one of the motors stopped turning and that ended the competition for ND Team.

10:00 — 3rd round
Loading at the statue, unloading at the Chocolate Factory … but it didn't work out. Actually, no team arrived for loading. To boost my optimism, I took Matty
and went for a walk with him in the park — see video (trailer: ends with a collision with Helhest).

11:30 — 4th round
Helhest drove around the bend to the second bridge, Istrobotics successfully loaded, but did not deliver the cargo, Artemis drove out of the semi-autonomous zone and continued to the park
(video). Sĺňava also drove to the park and received an unofficial point for leaving the start. Only Unidroids danced in front of the entrance and did not want to go any further.

{kind=link}
12:30 — end of the competition and announcement. I'm actually glad that it turned out so clearly and we didn't have to argue whether both days count or just the better one
as I promised. The competition was very demanding and once again I would like to thank all the teams for their active participation and commitment and the management of Buchlovice Castle for the great facilities and support.
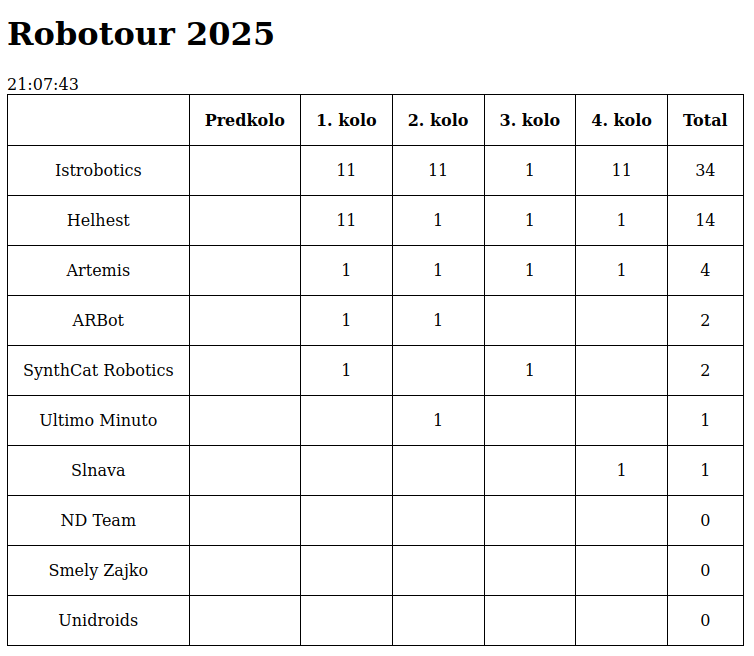
21:00 — I'm happily back home, completely exhausted … but it was really nice, the weather finally cleared up in the critical slots (it was horrible at night —
many hours of rain and thunderstorms), so good. But now for some reason the results for the 4th round haven't been updated, so maybe you can tell from the photo who won. I would like to add
the two days of "blog", but I'd rather not promise anything anymore …

|
p.s. when the results are downloaded and re-uploaded, they are visible …
|
Online Robotour Workshop (recording)
- Robotour Workshop
- Wednesday, 1st October 2025, 20:00 – 21:00
Other videos
If you want to support the competition in any way or have any additions/questions,
so please contact us using the contact form.