Introduction of teams
1, 1, 2, 3, 5 ...
Nice! Fibonacci would be happy — Switzerland, Germany, Poland, Slovakia and Czech Republic. There are 12 teams registered in total. The distribution is, when compared to previous years, more international this time . So when and where you can see the teams to compete? 20th September 2014, Borský park, Plzeň/Czech Republic. Concurent starts of all robots at 10am, 11am, 2pm and 3pm.
Teams
YouTube playlist of all registered teams
AmBot (CZ)

|
youtube http://youtu.be/RC306Ex3aVU
Robot Ferda is modified kids electric car ("ride-on") for Robotour 2014. The
main control system is Arduino based with ATmega2560. It takes care of
motors control, integrates magnetometer and two sonars for obstacle detection.
It also reads data from external GPS receiver via Bluetooth converter. Arduino
software provides possibility to define GPS waypoints and the car tries to
navigate by them. It can accept also commands from Bluetooth converter. The
goal is to extend system with Android smartphone running simple application
with visual navigation (to keep the robot on the road).
ARBot (CZ)

|
youtube http://youtu.be/ve-CoNReFTw
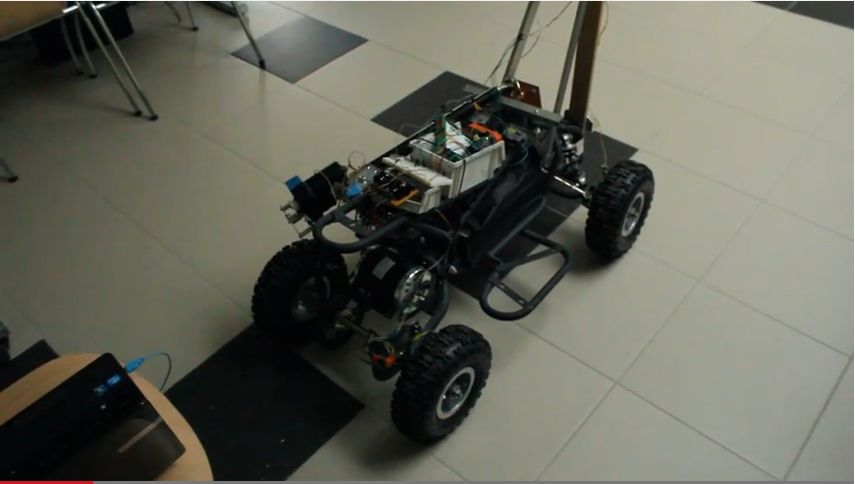
ARBot is a small robotic vehicle constructed for outdoor competitions of
autonomous robots. The robot has four-wheels chassis, each wheel is powered and
has encoder. Robot has camera, GPS, AHRS unit and three sonars. The computation
is handled by DSP BF537 with power 1000 MIPS.
AutoLUT2 (PL)
|
The vehicle is driven by 36V DC motor and it can turn using an electric
ram. It is controlled by the arduino microcontroller and additional
computer.
Blade XXII (SK)

|
Leopard Pro 36 converted to eletric power
STM32F103 - motor/servo control, sensors
Radxa Rock - navigation, optical recognition
Cogito (CH/CZ)

|
youtube http://youtu.be/2H_66EUvTKg
Lot of hardware, lot of software, lot of fun.
All electronic of robot B-trix is, as in 2012, attached to electrochassis 1:5
and low-level control handles Arduino Duemilanove. There was serious upgrade
of sensoric part - new laser rangefinder, compass has inclination compensation,
number of sonar is tripled, "ordinary" camera was replaced by stereo camera.
Xtion remained but nobody expects anything from it. GPS, magnetic encoder,
gyroscopes and accelerometers are common sensors on this contest.
The high level control is managed by mini-ITX with Atom processor There are so
many Ethernet toys that robot carries its own intranet. Software is mixture of
Python, C++, C and bash. A plenty of vision, plenty of planning, but it is
almost impossible to compute it in time.
Istrobotics (SK)

|
youtube http://youtu.be/395K47_SHfc
The base of the robot is modified RC model TRAXXAS E-MAXX (3903). It is
equipped with webcam, GPS, sonars HC-SR04, IMU with 3D compass and magnetic
IRC. The basic sensors handles arduino mega. The image processing and GPS runs
on 8" tablet with Intel Atom and Windows 8. The program is written in C++ and
is using OpenCV.
JECC (DE)

|
youtube http://youtu.be/Doo27P37gCs
4 wheel drive
powered by Lipo 42 5000 mAh
motorcontroller: DRV8800
Controller: Beagle Bone Black
NDTeam (CZ)

|
youtube http://youtu.be/FWOTWIGRihw
Robot Robík is own construction inspired by robot Orpheus. It weights
approximately 15kg, driven by two DC motors with planetary gearbox. The wheels
are connected with toothed belt. The control is own electronics based on ARM
processor Cortex M3. Equipment: GPS + 9 DOF AHRS, sonar, camera+OpenCV on
platform Odroid U3 for road detection.
Plecharts (CZ)

|
youtube http://youtu.be/j4cK0xIAdUU
The robot construction is from freely available parts. The skeleton is mounted
from aluminium profiles. The drive is by two electromotors with maximal
combined power about 2.6 kW. The power supply is provided by two Pb accumulators
12V 72 Ah each (usually only one is used). The maximal speed is about 0.5 m/s.
All modules (sensors, motor control, etc.) communicate by TCP/IP protocol.
Software is written in pure C++, and runs on older notebook. The road
recognition uses neural networks. Park navigation may use GPS, maybe even some
map.
Radioklub Písek (CZ)

|
youtube http://youtu.be/bAk96kyaTgc
Radioklub Písek is participating already for the 6th year on robotic outdoor
competitions. Last year we completed new robot E-liška, and we took it
for the first time to ROBOTOUR, where we reached 3rd place, again. And this year
3rd place on Robotem Rovně and 3rd place on RoboOrienteering . After small
upgrades we count with it on ROBOTOUR 2014. E-liška dimensions are 95x60x48 cm
and weight approximately 40 kg. The on-board voltage is 24V, provided by two gel
accumulators 12V/18Ah. E-liška has spring-loaded four-wheel chassis with
Ackermann steering and all wheels are powered. Each wheel has its own control
unit. We use Lidar Sick , GPS a 9dof unit for orientation. The main control
handles notebook, and motors have its own module with STM32. The power control
is handled by H-bridges of own construction. The main program is written in
Python and runs on Linux.
Smely Zajko (SK)

|
HARDWARE:
Parallax (Motor Mount and Wheel Kit), encoders, 2xHB25
Sbot board (AVR ATmega128, designed and assembled by David Gustafik)
PC ASUS UL30V
5x SRF-08
GPS NaviLock NL-302U USB SiRF III
Compass with tilt compensation (HMC6343)
AVR ATmega8 (compass driver)
Camcorder Panasonic SDR-T50 (or USB webcam)
video grabber EasyCap DC60 USB 2.0 TV DVD VHS Video Adapter W / Audio
AV Capture TV DVD CVBS-Adapter
usual usb hub
Power: HAZE HZS 12V 9Ah
handmade wood & aluminium base (contributions by Miroslav Nadhajský
and Pavel Petrovič)
red power switch, and power circuitry (contributions by Richard Balogh)
SOFTWARE:
Ubuntu 14.04 Desktop LTS
Netbeans
OpenCV
Smelý zajko controller utilizing an Artificial Neural Network (FANN)
(result of Miroslav Nadhajský master thesis)
SBOT firmware written in C/AVR Studio (David Gustafik) with
modifications (Pavel Petrovič)
Compass driver with serial port interface written in C/AVR Studio
available at https://code.google.com/p/smely-zajko/
TAPAS Team (PL)

|
Robot's hardware was intended to be simple, modular reliable. It's main
body is built from aluminium profiles. Motors are rigidly mounted with
wheel mounted on their's shaft. Considering electronics, we use prebuild
motor drivers, Discovery STM32F4 evaluation board with cape made by us,
AHRS sensor, Hokuyo laser scanner, GPS receiver and nettop computer. All
peripherials are conneted by USB link. Some parts, especially fixings,
were 3D printed.
Software is composed of 3 main modules: localization, movement
constraints and navigation. First one uses Extended Kalman Filter and
data from AHRS, encoders and GPS to obtain global position. Second one
uses Hokuyo laser scanner and camera to compute movement constraints. It
consists two parts: obstacles detection from point cloud (agregated from
laser scans) and terrain classification from combined camera image and
point cloud intensity values. The last module uses Vector Field
Histogram for local planning and A* for global one. As a base we use
Ubuntu operating system. For telemetry and development purposes we use
remote desktop and dedicated GUI.
If you would like to somehow support this contest or you have some
comments/question, please use our standard contact form.