Představení týmů
1, 1, 2, 3, 5 ...
Pěkné! Fibonacci by měl radost — Švýcarsko, Německo, Polsko, Slovensko a Česko. Celkově se zaregistrovalo 12 týmů. Rozložení je však ve srovnání s předešlými roky více mezinárodní . Kdy a kde je uvidíte? Borský park, Plzeň 20. září 2014. Hromadné starty robotů v 10h, 11h, 14h a 15h.
Týmy
YouTube playlist všech registrací
AmBot (CZ)

|
youtube http://youtu.be/RC306Ex3aVU
Robot Ferda pro Robotour 2014 je upravené dětské elektrické autíčko
("ride-on"). Základním řídicím systémem je kontrolér na bázi Arduina s
ATmega2560, který ovládá motory autíčka, využívá magnetometr jako kompas, dva
sonary pro detekci překážek, čte data z externího GPS přijímače a komunikuje s
bluetooth převodníkem. Arduino software umožňuje definovat průjezdní GPS body a
pak autíčko mezi těmito body navigovat. Umí také reagovat na příkazy z
bluetooth převodníku. Cílem je, aby do září 2014 byl systém doplněn o
smartphone s Android aplikací pro jednoduchou vizuální navigaci (pro udržení se
na cestě).
ARBot (CZ)

|
youtube http://youtu.be/ve-CoNReFTw
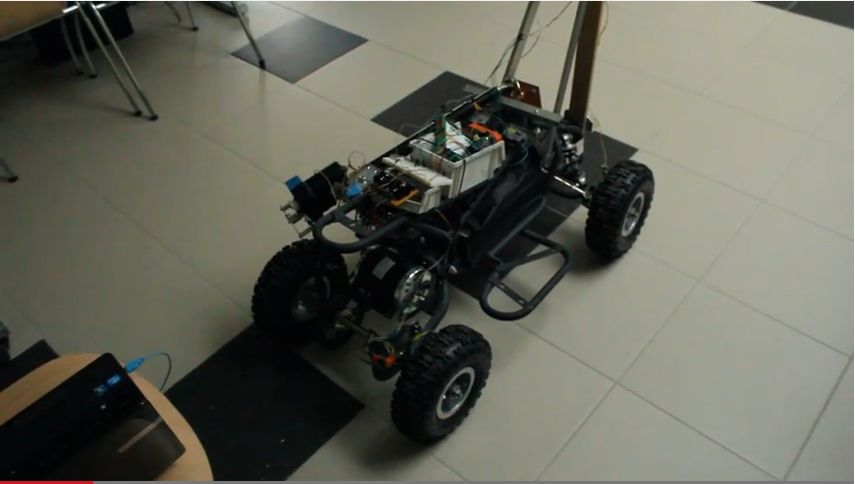
ARBot je malé robotické vozítko konstruované pro outdoor závody
autonomních robotů. Robot má čtyřkolový podvozek, každé kolo je poháněné
a opatřené enkoderem. Robot je vybaven kamerou, GPS, AHRS jednotkou a
třemi sonary. O výpočty se stará DSP BF537 o výkonu 1000 MIPS.
AutoLUT2 (PL)
|
The vehicle is driven by 36V DC motor and it can turn using an electric
ram. It is controlled by the arduino microcontroller and additional
computer.
Blade XXII (SK)

|
Leopard Pro 36 prerobeny na elektricky pohon
STM32F103 - riadenie motora/serv, senzory
Radxa Rock - navigacia, opticke rozpoznavanie
Cogito (CH/CZ)

|
youtube http://youtu.be/2H_66EUvTKg
Spousta hardware, spousta software, spousta zábavy.
Jako už v roce 2012, všechna elektronika robota B-trix je navěšena na
elektropodvozku 1:5 a low-level řízení obstarává Arduino Duemilanove.
Senzorická část prošla výrazným upgradem - přibyl laserový skener,
kompas je nyní kompenzován vůči náklonu, počet sonarů se ztrojnásobil,
"obyčejnou" kameru nahradila stereo kamera. Xtion sice zůstal, ale nikdo
od něj už nic nečeká. GPS, magnetický enkodér, gyroskopy a akcelerometry
jsou na této soutěži běžnou výbavou.
O řízení vyšší úrovně se nyní stará mini-ITX s Atomovým procesorem.
Ethernetových věcí je už tolik, že si robot vozí vlastní intranet.
Software je napsán ve směsici Pythonu, C++, C a bashe. Spousta vidění,
spousta plánování, upočítat se to pořádně nedá.
Istrobotics (SK)

|
youtube http://youtu.be/395K47_SHfc
Zaklad robota je upraveny RC model TRAXXAS E-MAXX (3903). Senzoricky je
vybaveny webkamerou, GPS, sonarmi HC-SR04, IMU s 3D kompasom a
magnetickym IRC. Zakladne senzory spracovava arduino mega. Spracovanie
obrazu a GPS zabezpecuje 8" tablet s Intel Atom a Windows 8.
Naprogramovany je v C++ a OpenCV.
JECC (DE)

|
youtube http://youtu.be/Doo27P37gCs
4 wheel drive
powered by Lipo 42 5000 mAh
motorcontroller: DRV8800
Controller: Beagle Bone Black
NDTeam (CZ)

|
youtube http://youtu.be/FWOTWIGRihw
Robot Robík vlastní konstrukce inspirované robotem Orpheus. Hmotnost cca
15kg, pohon dvěma DC motory s planetovou převodovkou, kola spřažená
ozubenými řemeny.
Řízení vlastní elektronikou na bázi procesoru ARM Cortex M3. Vybavení:
GPS + 9 DOF AHRS, ultrazvuk, kamera+OpenCV na platformě Odroid U3 pro
detekci cesty.
Plecharts (CZ)

|
youtube http://youtu.be/j4cK0xIAdUU
Konstrukce robota se skládá z volně dostupných dílů, kostra je sestavena
z hliníkových profilů. Pohon pomocí dvou elektromotorů o maximálním
kombinovaném výkonu asi 2.6 kW. Napájení je zajištěno dvojicí olověných
akumulátorů 12V 72 Ah každý (normálně využíván pouze jeden). Maximální
rychlost okolo 0.5 m/s. Všechny moduly (senzory, ovládání motorů,
apod…) spolu komunikují pomocí protokolu TCP/IP.
Software je napsán kompletně v jazyce C++, běží na postarším notebooku.
Rozpoznávání cesty funguje na principu neurální sítě. Navigace v parku
pomocí GPS, možná i pomocí nějaké mapy.
Radioklub Písek (CZ)

|
youtube http://youtu.be/bAk96kyaTgc
Radioklub Písek se již 6. rokem účastní robotických soutěží outdoorových
robotů. V minulém roce jsme dokončili nového robota E-lišku. Loni jsme s
ním jeli poprvé na ROBOTOUR, kde jsme obsadili opět 3. místo , letos na
Robotem Rovně opět 3. místo a na RoboOrienteeringu zase 3. místo. Po
menších úpravách
s ním letos počítáme i na ROBOTOUR 2014. E-liška má přibližné rozměry
95x60x48 cm a hmotnost je zhruba 40 kg. Palubní napětí 24V zajišťují
2 gelové akumulátory 12V/18Ah. E-liška má odpružený čtyřkolový podvozek
s Ackermannovým řízením a pohonem všech čtyř kol, každé samostatnou
pohonou jednotkou. Pro orientaci využíváme Lidar Sick , GPS a 9 DOF inerciální
jednotku. Hlavní řízení robota zajišťuje notebook, řízení pohonů
zajišťuje vlastní modul s STM32. Výkonové řízení zajišťuje vlastní
konstrukce H-můstků. Řídící program napsán v Pythonu běží na Linuxu.
Smely Zajko (SK)

|
Popis robota:
HARDWARE:
Parallax (Motor Mount and Wheel Kit), encoders, 2xHB25
Sbot board (AVR ATmega128, designed and assembled by David Gustafik)
PC ASUS UL30V
5x SRF-08
GPS NaviLock NL-302U USB SiRF III
Compass with tilt compensation (HMC6343)
AVR ATmega8 (compass driver)
Camcorder Panasonic SDR-T50 (or USB webcam)
video grabber EasyCap DC60 USB 2.0 TV DVD VHS Video Adapter W / Audio
AV Capture TV DVD CVBS-Adapter
usual usb hub
Power: HAZE HZS 12V 9Ah
handmade wood & aluminium base (contributions by Miroslav Nadhajský
and Pavel Petrovič)
red power switch, and power circuitry (contributions by Richard Balogh)
SOFTWARE:
Ubuntu 14.04 Desktop LTS
Netbeans
OpenCV
Smelý zajko controller utilizing an Artificial Neural Network (FANN)
(result of Miroslav Nadhajský master thesis)
SBOT firmware written in C/AVR Studio (David Gustafik) with
modifications (Pavel Petrovič)
Compass driver with serial port interface written in C/AVR Studio
available at https://code.google.com/p/smely-zajko/
TAPAS Team (PL)

|
Robot's hardware was intended to be simple, modular reliable. It's main
body is built from aluminium profiles. Motors are rigidly mounted with
wheel mounted on their's shaft. Considering electronics, we use prebuild
motor drivers, Discovery STM32F4 evaluation board with cape made by us,
AHRS sensor, Hokuyo laser scanner, GPS receiver and nettop computer. All
peripherials are conneted by USB link. Some parts, especially fixings,
were 3D printed.
Software is composed of 3 main modules: localization, movement
constraints and navigation. First one uses Extended Kalman Filter and
data from AHRS, encoders and GPS to obtain global position. Second one
uses Hokuyo laser scanner and camera to compute movement constraints. It
consists two parts: obstacles detection from point cloud (agregated from
laser scans) and terrain classification from combined camera image and
point cloud intensity values. The last module uses Vector Field
Histogram for local planning and A* for global one. As a base we use
Ubuntu operating system. For telemetry and development purposes we use
remote desktop and dedicated GUI.
Pokud chcete soutěž nějakým způsobem podpořit nebo máte nějaké doplnění/dotaz,
tak se nám prosím ozvěte pomocí kontaktního formuláře.