Představení týmů
kolik robotů dorazí na první ročník soutěže?
Soutěž RoboTour2006 se pomalu blíží a tak je na čase udělat malý přehled týmů, které už několik měsíců připravují své roboty. Jak uvidíte škála je opravdu široká: od malých upravených RC autíček až po velké a finančně náročné komerční Pioneer3. Aktuálně je do soutěže přihlášeno 13 týmů.
BenderTeam

|
Tříčlenný brněnský tým po vedením Stanislava Vecheta (další členové týmu jsou
Jiří Krejsa a Vít Ondroušek).
Píšou: Chceme sestrojit robota schopného splnit
zadaný úkol. To znamená postavit robota na start a podle zadané mapy
projet danou cestou až do cíle. Během plnění zadaného úkolu se robot bude
všemožně snažit nesjet z cesty vymezené chodníkem a nepřejet žádného náhodného
kolemjdoucího. Momentálně máme robota, který jezdí po chodníku u nás v Brně,
ale ještě občas sjede mimo chodník i na rovném úseku a křižovatky mu dělají
taky celkem problém …
Czech DDR

|
Dvoučlenný pražský tým tvoří Ondřej "Sniper" Flidr a jeho kolega NX-306 (pravé
jméno utajeno). Pokud nevíte, co v názvu týmu znamená DDR, tak se jedná o hru
původem z Japonska (Dance Dance Revolution) a Czech DDR je sdružení pro české
příznivce tohoto druhu zábavy (viz např. http://ddr.pocitac.com/).
Skupinka převážně studentů z SSSVT, si řekla, cituji
Sakra to přeci nemůže bejt těžký a teď staví robota, aby to dokázala. Na
posledním testování ve Stromovce byl na kostkách trošku problém s jízdou
merkurového vozíku s baterkou, ale to snad do 14. října dořeší.
Dragons ČVUT & Salamanders
|
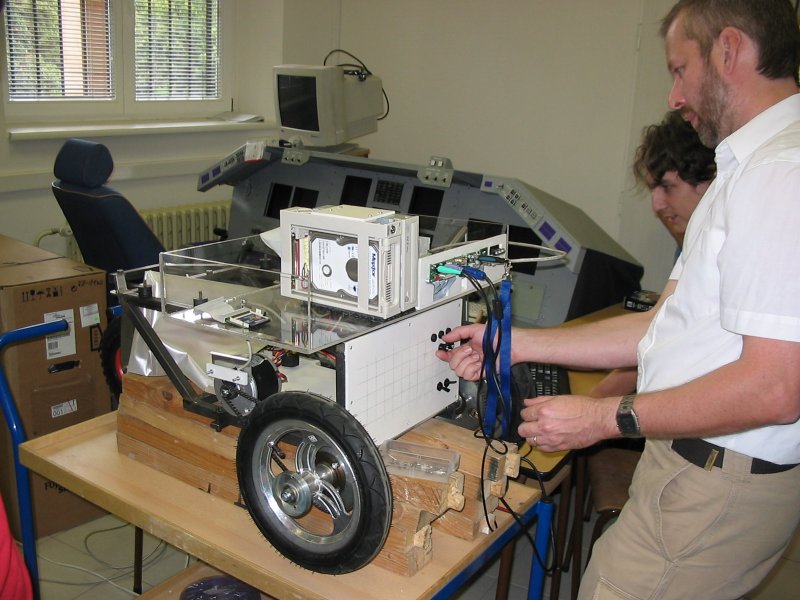
Tento tým (resp. korporace) připravuje tříkolového robota s diferenciálním
řízením. Pohon je realizován pomocí dvou motorů do motorových koloběžek.
Palubní počítač se má starat o navigaci z GPS, odometrie, virtuální mapy a
zpracování obrazu.
Jelikož robot se už během prvních testů choval divoce a stihl udělat malou díru
do dveří, bude to jeden z příkladů robotů na vodítku. Unikátní je teď např.
vystřelovací pojistka, která okamžitě blokuje všechna hnaná kola a robota
zastaví, i když se elektronika a software brání.
GL — IMR
|
Gerstner Laboratory — Intelligent and Mobile Robotics Group z Prahy předvede
jednoho ze svých experimentálních Pioneer3 robotů. Původně byli nominováni dva
roboti: jeden postaven čistě na integraci senzorů pro určení pozice (GPS,
odometrie, gyroskopy, akcelerometry) a druhý měl použít pro lokalizaci mapy
(laser a kamera). Z časových důvodů se momentálně pracuje pouze na první verzi
s tím, že bude případně do systému integrována ještě kamera.
Vedoucí tohoto týmu je Jan Faigl, členové pak Jan Chudoba a Tomáš Krajník.
HiBeMaTo

|
Bedřich Himmel už delší dobu plánuje automatickou sekačku trávy na zahradu.
RoboTour pak byla ideální záminka, proč se to stavby pustit. Píše: Cílem je
robotický samohyb, který bude schopen reprodukovat trasu, kterou před tím
projede s manuálním ovládáním. Základním ,,navigačním'' prostředkem bude
odometrie. Dále počítám s využitím kompasu, inklinometru, sonaru. Základ
samohybu tvoří podvozek 4x4 osazeny BLDC motory s hallovými
snímači a převodovkou. Řizení je diferenční.
Istrobotics
Istrobotics je slovenský tým (ano, takže už první ročník bude mezinárodní! ),
který vede Pavol Boško. Píše:
Cielom nasho timu je postavit robota, ktory bude shopny plnit ulohy, ktore
vyplyvaju zo zadanie sutaze RoboTour 2006. Ulohou robota je autonome prejst v
danom casovom limite 1h, drahu dlhu priblizne 1km. Trasa bude zadana pomocou
siete ciest v RNDF formate a kontrolnych bodov MDF. Robot musi uviest naklad -
5litrovy pivny sud plny vody. Robot musi mat elektricky pohon. Z tychto dovodov
sme ako vozidlo sme si zvolili detsku slapaciu formulu GO-KART, ktora bude
prerobena na elektricky pohon. Robot bude vybaveny kamerou s PAL vystupom,
ktory sa bude spracovavat pomocou grabovacej karty a notebooku. Dalej bude
vybaveny DPS primacom a snimacmi v naraznikoch. Obraz z kameru bude spracovavny
pomocou kniznice OpenCV, ktora poskytuje velke mnozstvo funkcii pre spracovanie
obrazu.
MART - SkyMap 2006
Tým MART se pokusí trošku upravit svého robota Kubíka pro outdoor (prý aby mu
doma nebylo smutno). Honza Benda píše: Robot poveze tentokrát notebook, aby
neměl problém s výkonem PC a bude se lokalizovat podle obrysu oblohy (image
based omnivision). Den před soutěží si zmapujeme trať, pak uvidíme.
Vision-based MCL by měla stačit na udržení se na cestě.
Propeler-team
Středoškolský tým z Opavy a okolí, který chce postavit malého autonomního
robota. Jako pohon použije aku-šroubováky, zatáčení pomoci serv a řízen bude
pomocí notebooku. Cesty chce rozpoznávat pomocí kamery.
R-team
R-team pod vedením Martina Lockera asi většina z vás znáte jako vítěze
posledních dvou ročníků soutěže Eurobot. „Tým” zatím tvoří pouze Martin (to jsou
ty prázdniny) s tím, že se pokusí upravit do terénu svého robota MR06. Pro
navigaci chce použít odometrii, kompas a možná gyro.
Robohemia
Tým vedený Luďkem Žaludem z VUT Brno (je-li vám jméno týmu povědomé, tak to
není náhodou - hledejte ho však v souvislosti s robotickým fotbalem nebo např.
RoboCup-Rescue) připravuje robota pod pracovním
jménem Hermes. Stav robota je však momentálně neznámý …
Robsys Racing Team
Jan Roubíček, Tomáš Roubíček a Jan Neškudla připravuje na soutěž čtyřkolového
robota Beerbot. Zatím neznáme žádné podrobnosti, ale pokud stihnou robota
dokončit, tak se snad máme nač těšit. Z dílny Jana Roubíčka pochází např.
trojúhelníková konstrukce robota Berta později přejmenovaného
na Daisy…
Short Circuits Ústí nad Labem

Jirka Iša předvede trošku nestandardní vozidlo: vznášedlo. Nechystá se do boje
o první příčky, spíše o ukázku jak také může vypadat outdoor robot. Jirka
je např. autorem robota Ferda, kterého jsme mohli vidět
na českém kole soutěže Eurobot 2005.
Jelikož notebook je příliš těžký, tak by robot měl být řízen iPAQem. Robot má
zatím za sebou první let — ruční řízení přes notebook, přes parkoviště
tam a zpět včetně zběsilého kličkování, tj. vzdálenost cca 60 m.
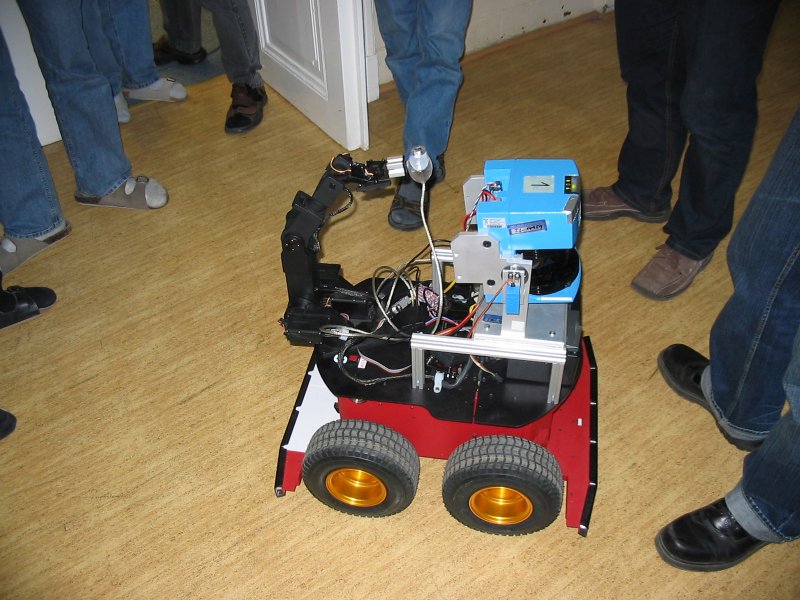
Sirael

|
Stejně jako robot týmu Dragons ČVUT & Salamanders měl divoké začátky. Na
jednom z prvních testování, kdy byl robot analogově ovládán pomocí joysticku,
vypadl konektor a robot se „splašil” a maximální rychlostí vyrazil vpřed…
P.S. robot se jmenuje Hana.
Testování ve Stromovce 26.8.2006

|

|

|
Další fotky: Bender Team

|

|

|
Logo a varovné značky
|
Návrh loga: Jan Benda (MART) |
") Návrh varovné značky: Stanislav Vechet (BenderTeam) |