Robotour 2025
zámecký park Buchlovice
Dvacátý ročník soutěže outdoorových autonomních robotů se bude konat 13.-14. září 2025 v zámeckém parku Buchlovice (opakování po loňských povodních). Do krásného parku se sice platí vstupné, ale lze jej zkombinovat i s návštěvou zámku. Soutěž je přístupná veřejnosti. Update: 3/10/2025 — Online Webinář (záznam k dispozici)
Pravidla
Lokalita
Soutěž bude probíhat v zámeckém parku Buchlovice.
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
|












Registrace
Stejně jako v posledních ročnících, pošlete prosím do konce července 2025 mail na adresu webmaster-at-robotika.cz se subj. Robotour 2025 - jméno týmu.
Pokud je robot nový, připište detailnější HW/SW popis.
Součastí registrace je i link na letošní YouTube video s titulkem ROBOTOUR 2025 REGISTRATION - jméno týmu, dokazující, že váš robot (stále) funguje. Jízda 10m po
cestičce, detekce překážky, funkčnost Emergency STOP tlačítka.
Týmy 2025
Předregistrované týmy z roku 2024
- ARBot (CR)
- BeMaTo (CR) — nové jméno Helhest
- Istrobotics (SR)
- Sĺňava (SR)
- Smelý Zajko (SR)
- SynthCat Robotics (CR)
Marathon
- ND Team (CR) — registrace pomocí Robotour Marathonu (2025-06-07)
Nové týmy
- Artemis (CR)
popis
HW: Podvozek: Hunter SE od Agilex PC: Asus NUC I5 Kamery: 2x RealSense D435 od Intelu Display: 10" WaveShare GPS: Septentrio mosaic-go Wifi: Mikrotik mAP lite SW: OS: Ubuntu 24.04 LTS ROS2 Jazzy NAV2 - Ultimo Minuto (CR+SR)
popis
Vlastná konštrukcia poskladaná od základov, materiál prevažne železo, šmykové riadenie Pohon: jednosmerný motor, 2×24 V Driver: PWM staršej konštrukcie, je plánovaná výmena za silnejší driver Napájanie: 2×12 V do série, gélovo-olovený akumulátor Riadenie: PC – laptop so systémom Windows 11, riadiaci softvér v Pythone Momentálne pracuje len s kamerou, ale bude pripojený aj malý LiDAR. Na videu je vidieť dnešnú prvú jazdu vonku, takže je ešte čo dorábať. Dúfame, že všetko stihneme do termínu súťaže. - Unidroids (CR)
popis
Hardware: Výpočetní jednotka: NVIDIA Jetson Orin Nano (8GB, JetPack 6.2) Kamery: 2× IMX219 (CSI, 200° FOV) – stereo pohled dolů LiDAR: Unitree L2 (Ethernet) GNSS + Dead Reckoning: C102-F9R (USB) Základna: Hoverboard s upraveným firmware, řízená přes USB sériovou linku Ovládání: Mobilní telefon (Android Infinix Smart 8) Datové úložiště: SSD Lexar NM620 2TB (rozdělené pro systém, logy a projekty) Software: Linux (Ubuntu, JetPack 6), služby psané v Pythonu Využíváme vlastní architekturu s oddělenými socketovými a HTTP službami (FastAPI) Videa, segmentace, detekce překážek a řízení jsou implementovány jako samostatné procesy Vývoj probíhá vzdáleně z VSCode přes USB-C (gadget mode, headless) https://github.com/unidroids/robotour2025
Pozvánka
Soutěžit se bude v sobotu odpoledne (13/9/2025 14-16) a v neděli dopoledne (14/9/2025 10-12), ale některé týmy budou v zámeckém parku pravděpodobně
testovat už v pátek.
Ke stažení je oficiální pozvánka (PDF).

|
K dispozici bude též https://live.robotour.cz/ s přesnými časy startů a QR kódů pro roboty.
Partneři
|
|
Blog (md)
Sobota 13. září 2025
10:00 — cesta po D1 byla kupodivu bez problémů (ano, vstával jsem v 4:10, tedy tělo mne donutilo vstát, a přece se nebudu vracet do postele, když
budíček byl nastaven na 4:40), takže do Buchlovic jsme s Tomášem (SynthCat Robotics) dorazili okolo 9h. To byl zároveň začátek otevírací doby parku, aneb
lepší časování snad ani nešlo. Horší je to s počasím — leje jak z konve, že mi to až přespříliš připomíná loňské záplavy. :-(
Včera měly dorazit 4 týmy, ale žádný se prý v parku neukázal — buď nedorazily, nebo problémů k řešení mají dost i bez parku, nebo se zpráva někde ztratila. Ale
ani teď (10h) tu nikdo mimo Tomáše není. Máme luxusní zamecké zázemí … svatbu bych si tady dovedl představit. A pokud se to počasí neumoudří (předpověď
moc pozitivní není), tak za střechu nad hlavou budeme opravdu hodně vděčný!

Prošel jsem si narychlo park a … soutěžící si často stěžují, že na ně chystám samé záludnosti — ono není třeba, ta realita je fakt „krutá”. Mám sice pocit,
že Matty by to dal, ale třeba Eduro asi ne. Různé můstky, odvodňovací kanálky (fakt jsou tady potřeba), louže (kde kanálky
nejsou), kořeny … prostě správný Anglický park … to že pod mokrými stromy není GPS je už jen detail. Ja vím, že mne stejně ukamenují, ale … nemusel
jsem nic zesložiťovat.
11:00 — dorazil ARBot a Istrobotics. Aleš (ARBot) se prý bude ještě dnes vracet do Prahy, ale Istrobotics stihli ještě včera večer jednu
rychlou jízdu a je to prý náročné. Zmiňovali nově zakládaný záhon, který je černý a neuronka ho vyhodnocuje jako asi asfaltovou cestu. Jinak přestalo pršet
a krátce jsem zahlédl i sluníčko. Ještě je naděje.
doplněno 15/09/2025
12:00 — to byl skoro čas vyrazit na oběd, ale zároveň se začaly objevovat další týmy. Aneb toto by z organizačního hlediska chtělo „trochu” pořešit (nejspíše
návratem k původnímu soutěžení jenom v sobotu, ale od rána do večera). Ultimo Minuto dorazili se svým evidentně dost těžkým strojem (dva lidé se s ním celkem
prali). Michal říkal, že se k Robotour vrací po 15ti letech a jestli pamatujete tank z Robotour 2010,
Tatran team, tak to je ta souvislost.
Objevil se i Helhest a Artemis — samí větší roboti. A počasi se začalo umoudřovat. Tak alespoň rychlý oběd …



13:00 — testovací před-kolo. Doprovodil jsem Istrobotics do místa nakládky i cestou k vykládce … jen robot v jeden okamžik pivo vzteky odhodil.
Byl to velký schod u nájezdu na můstek a soudek vypadl:

Myslím, že několik týmů by si zasloužilo alespoň bod, ale nebyl jsem na startu a do celkových výsledků se to stejně nepočítá.
14:00 – 1. kolo
Zadání nakládky a vykládky bylo stejné jako v testovacím před-kole (motivace, proč se účastnit nepovinného před-kola). Tentokrát jsem
doprovázel velkou třikolku Helhest, která prokličkovala na první most a dojela až k nakládce. Po zadání dalšího cíle (vykládka), ale při otáčení o 180 stupňů
robot vyjel z cesty. Ale velmi pěkná (a dramatická) jízda.

Istrobotics bez problémů zopakovali jízdu z před kola, ale na vykládku se také nedostali. Snad všechny jízdy natáčeli, tak případně doplním i dokumentační video.
ARBot měl problémy s USB kamerami — po různu vypadávaly a tak robot jel chvílemi jen na jednu kameru místo dvou. Další problém byl s pozicí na mapě a přestože
později robot už pekně navigoval po cestičkách jeho směrování nutně nevedlo k cíli a tedy pouze 1 bod za vyjetí ze semi-autonomní zóny. Podobně na tom byl i Tomáš alias
SynthCat Robotics a kluci s Artemis. Nejvíce se na startu trápili Unidroids, kde se robot pěkně vykrucoval, že prostě rovně nepojede a Ultimo Minuto
také vždy jen kousek popojeli. Oba týmy tedy bez bodu.
15:30 – 2. kolo
Do druhého kola několik týmů začalo editovat mapu, resp. zakazovat automatické routování přes některé mosty. V zámecké zahradě mosty byly 4 a každý měl nějakou zradu.
Po pravdě mne trošku vyděsilo, když se Istrobotics vrhli úzkou cestičkou z kopce na menší můstek, ale nebyli sami, tak to asi opravdu byla nejschudnější cesta.
Ve druhé jízdě se Helhestu už nepodařilo zopakovat úspěšnou nakládku ani žádnému dalšímu týmu. Na druhou stranu bodoval Ultimo Minuto a „něco se pokazilo”
SynthCat Robotics.

Neděle 14. září 2025
doplněno 15/09/2025
9:00 — ráno pršelo. Přesněji celou noc lilo a bouřilo, že mi to silně připomínalo loňské povodně. Přesto dorazil PavelS/ND Team se Sayou a po chvíli
i Andy/Sĺňava s autíčkem. Špatná zpráva byla, že když PavelS jel s robotem od auta na joystick, tak se jeden motor přestal otáčet a tím pro ND Team soutěž skončila.

10:00 — 3. kolo
Nakládka u sochy, vykládka u Čokoládovny … ale nedařilo se. Vlastně žádný tým k nakládce nedorazil. Abych si dodal optimismu, tak jsem vytáhl Mattyho
a šel se s ním projít do parku — viz video (upoutávka: končí kolizi s Helhestem).

11:30 — 4. kolo
Helhest vyjel v zatáčce ke druhému mostu, Istrobotics úspěšně naložil, ale náklad nedovezl, Artemis vyjel ze semi-autonomní zóny a pokračoval do parku
(video). I Sĺňava odjela do parku a dostala neoficiální bod za opuštění startu. Jen Unidroids tančil před vchodem a nikam
dál se mu nechtělo.

{kind=link}
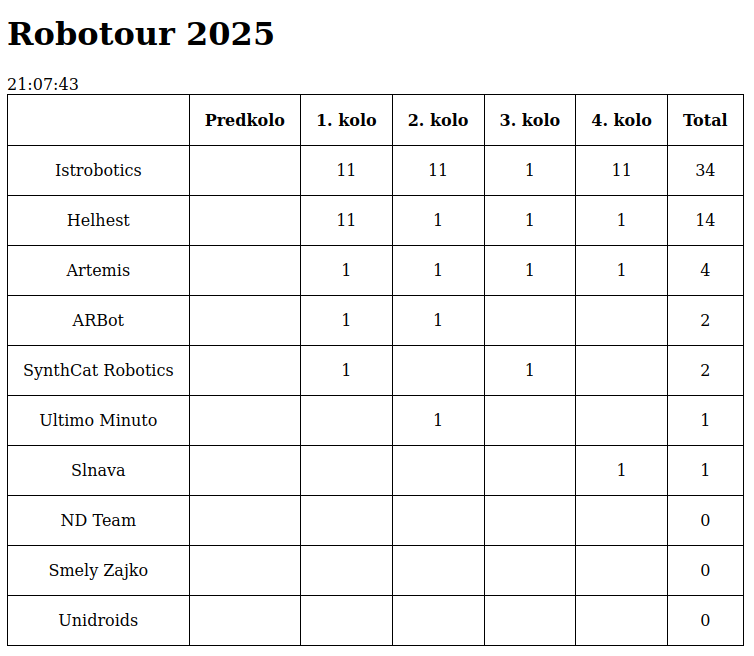
12:30 — ukončení soutěže a vyhlášení. Vlastně jsem rád, že to takto jednoznačně dopadlo a nemuseli jsme se dohadovat, jestli se počítaji oba dny, nebo jen ten lepší
jak jsem sliboval. Soutěž byla hodně náročná a ještě jednou bych rád poděkoval všem týmům za aktivní účast a nasazení a vedení zámku Buchlovice za skvělé zázemí a podporu.
21:00 — jsem šťastně zpátky doma, úplně vyřízený … ale bylo to moc fajn, počasí se nakonec v kritické sloty umoudřilo (v noci to bylo příšerné —
mnohahodinový slejvák a bouřky), takže dobrý. Teď se ale z nějakého důvodu neobnovily výsledky pro 4. kolo, tak možná z foto poznáte, kdo to vyhrál. Chtěl bych doplnit
ty dva dny „blogu”, ale už raději nic neslibuji …

|
p.s. když se ty výsledky stáhnou a znova nahrají, tak jsou vidět …
|
Online Webinář (záznam)
- Robotour Workshop
- Středa, 1. října 2025, 20:00 – 21:00
Další videa
Pokud chcete soutěž nějakým způsobem podpořit nebo máte nějaké doplnění/dotaz,
tak se nám prosím ozvěte pomocí kontaktního formuláře.